
Latest News
Congratulations to the six RAS members elected by the membership to serve a three-year term beginning 1 January 2022. We wish the newly elected members of the Administrative Committee success and thank all candidates for their willingness to serve and for permitting their names to be included on the ballot.
| Arash Ajoudani |
|
Insitituto Italiano di Tecnologia
Genova, Italy |
| Nancy Amato |
|
University of Illinois at Urbana-Champaign
Urbana (IL), USA |
| Fumihito Arai |
|
|
| Karinne Ramirez Amaro |
|
Chalmers University of Technology, Sweden
Gothenburg, Sweden |
| Inna Sharf |
|
McGill University
Montreal, Canada |
| Kenji Suzuki |
|
University of Tsukuba
Tokyo, Japan |






2022 RAS Fellows Evaluated by RAS
Harry Asada – Massachusetts Institute of Technology, USA
“For the design, modeling, and control of direct drive robotic arms”
Stephan Biller – Advanced Manufacturing International, Inc. (AMI), USA
"For leadership in the applications of Internet of Things and Artificial Intelligence in manufacturing industry"
Darwin Caldwell –Italian Institute of Technology, Italy
"For contributions to Actuator Technology, Legged Systems and Soft Human Friendly Robotic"
Abderrahmane Kheddar – University of Montpellier, France
"For contributions to robotic haptics and humanoids"
Katherine Kuchenbecker – University of Pennsylvania, USA
"For contributions to interactive haptic systems and robotic touch perception"
Youfu Li – University of California, USA
"For contributions to active visual sensing using structured light pattern projection"
Juan Tardos – Universidad de Zaragoza, Spain
"For contributions to simultaneous localization and mapping with visual sensors"
Pietro Valdastri – University of Leeds, UK
"For contributions to medical capsule robots"
Richard Voyles – Purdue University, USA
"For leadership in the implementation of programs that foster robotics research and the robotics community"
Peter Wurman – Sony AI, USA
"For contributions to computational auction, multiagent systems and robotics"
2022 RAS Fellows Evaluated by Other IEEE Societies
Evaluated by the IEEE Aerospace and Electronic Systems Society:
Chee-yee Chong – USA
“For contributions to information fusion methods for multi-sensor tracking”
Evaluated by the IEEE Computational Intelligence Society:
Zhijun Li – Univ. of Sci. & Tech. of China, China
“For contributions to control systems for wearable robotics and biomechatronics”
Evaluated by the IEEE Control Systems Society:
Daniel Abramovitch – Agilent Technologies, USA
“For contributions to the development of algorithms for control of mechatronic systems”
Evaluated by the IEEE Control Systems Society:
Ming Cao – Engineering and Technology institute Groningen, Netherlands
“For contributions to multi-agent control systems for sensor, robotic and social networks”
Evaluated by the IEEE Control Systems Society:
R Scott Erwin – Air Force Research Laboratory, USA
“For leadership and contributions to the development, implementation and on-orbit demonstration of spacecraft control technologies”
Evaluated by the IEEE Engineering in Medicine and Biology Society:
Silvestro Micera – Scuola Superiore Sant'Anna, Italy
“For contributions to restoration of human sensorimotor functions using engineered neuroprostheses”
Evaluated by the IEEE Industrial Electronics Society:
Xinkai Chen – Shibaura Institute of Technology, Japan
“For contributions to nonlinear adaptive control and nonlinear observer design for mechatronic systems”
Evaluated by the IEEE Oceanic Engineering Society:
Hanumant Singh – Northeastern University, USA
“For development of localization and mapping techniques and autonomous systems for marine and polar applications”
More About IEEE Fellows

IEEE Fellow is a distinction reserved for select IEEE members. The honor is conferred by the Board of Directors upon a person with an extraordinary record of accomplishments in any of the IEEE fields of interest.
If you know of an IEEE colleague who is a Senior Member or Life Senior Member in good standing, has completed five years of service in any grade of IEEE Membership and who has made an outstanding contribution to the electronic or electrical engineering profession, you can nominate this person in one of four categories:
- Application Engineer/Practitioner
- Educator
- Research Engineer/Scientist
- Technical Leader
Additional information about the IEEE Fellow program, and a list of RAS Fellows is available HERE.
Registration deadline: 10 January 2022
As the complexity of current robotic and embodied intelligent systems grows, it is more and more necessary to adhere to sound experimental approaches and benchmarking procedures. We think that it is of fundamental importance that the next generation learns good experimental, performance evaluation and benchmarking methods as part of their technical education. We will capitalize on our experience on organizing workshops on these topics and on the tradition of organizing robotics seasonal schools and virtual events. We believe that the field is now mature to try to convey all the accumulated knowledge and know-how in a one-week summer school format in order to present the relevant topics to the graduate students in a consistent and systematic way. Thanks to the R-article process in IEEE RAM, we are now able to make progress towards a widespread and much needed practice of Reproducible Research in Robotics.
This Seasonal School will provide necessary information, knowledge and motivation to support the community’s transition to an environment where reproducible research is possible and common.
Event Website
http://www.
The 1st International Winter School on Smart Materials for Soft Robots to be held at the University of Cambridge, United Kingdom from 12-18 December 2021. Registration is now OPEN to attend the virtual event (http://smartsummer.eu/). The five-day hybrid school aims to provide scientific and personal development for young researchers in the multidisciplinary fields of soft robotics and smart materials. The lectures will be from a mix of academic and industrial frontrunners which is run in a hybrid format. There are also exciting prizes to be won. The school is sponsored by the IEEE RAS Technical education program and supported by six other participating projects.
Please visit the website for more details: http://smartsummer.eu/
Congratulations to the IEEE Robotics and Automation Society members recently elevated to Senior Member status by the IEEE Admission and Advancement Senior Member Review Panel.
Congratulations to all award recipients of IEEE International Conference on Robotics and Automation (ICRA 2021)! Due to the hybrid event, we are saddened that some of these individuals could not be recognized in person. A complete RAS and ICRA Award brochure is available. It also contains IEEE and RAS Award recipients, plus all ICRA Best Paper Award Finalists.
IEEE ICRA Milestone Award
The award recognizes the most influential paper published in the Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) from approximately 20 years ago, between 1999-2003. Unlike the other RAS best paper awards that attempt to predict the future potential impact of a paper, this award looks back at the actual impact a paper has had.
Biped Walking Pattern Generation by using Preview Control of Zero-Moment Point
Shuuji Kajita, Fumio Kanehiro, Kenji Kaneko, Kiyoshi Fujiwara, Kensuke Harada, Kazuhito Yokoi, and Hirohisa Hirukawa
Proceedings of the 2003 IEEE lnternational Conference on Robotics & Automation, pp. 1620-1626
2021 ICRA Best Paper Award in Automation
Automated Fabrication of the High-Fidelity Cellular Micro-Scaffold through Proportion-Corrective Control of the Photocuring Process
Xin Li, Huaping Wang, Qing Shi, JiaXin Liu, Zhanhua Xin, Xinyi Dong, Qiang Huang and Toshio Fukuda
- An essential and challenging use case solved and evaluated convincingly. This work brings to light the artisanal field that can gain a lot in terms of safety and worker’s health preservation through the use of collaborative robots. Simulation is used to design advanced control architectures, including virtual walls around the cutting-tool as well as adaptive damping that would account for the operator know-how and level of expertise.
IEEE ICRA Best Paper Award in Cognitive Robotics
How to Select and Use Tools?: Active Perception of Target Objects Using Multimodal Deep Learning
Namiko Saito, Tetsuya Ogata, Satoshi Funabashi, Hiroki Mori and Shigeki Sugano
- Robots benefit from being able to select and use appropriate tools. This paper contributes to the advancement of robotics by focusing on tool-object-action relations. The proposed deep neural network model generates motions for tool selection and use. Results demonstrated for a relatively complex ingredient handling task have broader applications in robotics. The approach that relies on active perception and multimodal information fusion is an impactful contribution to cognitive robotics.
IEEE ICRA Best Paper Award on Human-Robot Interaction (HRI)
Reactive Human-To-Robot Handovers of Arbitrary Objects
Wei Yang, Chris Paxton, Arsalan Mousavian, Yu-Wei Chao, Maya Cakmak and Dieter Fox
- This paper presents a method combining real-time motion planning and grasp selection for object handover task from a human to a robot, with effective evaluation on a user study on 26 diverse household objects. The incremental contribution has been made for human robot interaction. Be great if the cost function of best grasp selection somehow involves robotic manipulation metric, eg., form closure.
IEEE ICRA Best Paper Award on Mechanisms and Design
Soft Hybrid Aerial Vehicle Via Bistable Mechanism
Xuan Li, Jessica McWilliams, Minchen Li, Cynthia Sung and Chenfanfu Jiang
- This paper presents a novel morphing hybrid aerial vehicle with folding wings that exhibits both a quadrotor and a fixed wing mode without requiring any extra actuation by leveraging the motion of a bistable mechanism at the center of the aircraft. A topology optimization method is developed to optimize the bistable mechanism and the folding wing. This work is an important contribution to design of hybrid aerial vehicles.
IEEE ICRA Best Paper Award in Medical Robotics
Relational Graph Learning on Visual and Kinematics Embeddings for Accurate Gesture Recognition in Robotic Surgery
Yonghao Long, Jie Ying Wu, Bo Lu, Yueming Jin, Mathias Unberath, Yunhui Liu, Pheng Ann Heng and Qi Dou
- This paper presents a novel online multi-modal graph learning method to dynamically integrate complementary information in video and kinematics data from robotic systems, to achieve accurate surgical gesture recognition. The proposed method is validated on collected in-house dVRK datasets, shedding light on the general efficacy of their approach.
IEEE ICRA Best Paper Award on Multi-Robot Systems
Optimal Sequential Stochastic Deployment of Multiple Passenger Robots
Chris (Yu Hsuan) Lee, Graeme Best and Geoffrey Hollinger
- The paper presents rigorous results (well validated experimentally) and visionary ideas: the innovative idea of marsupial robots is very promising for the multi-robot systems community.
IEEE ICRA Best Paper Award in Robot Manipulation
StRETcH: A Soft to Resistive Elastic Tactile Hand
Carolyn Matl, Josephine Koe and Ruzena Bajcsy
- The committee was particularly impressed by the high level of novelty in this work with unique applications for tactile manipulation of soft objects. Both the paper and presentation provided a clear description of the problem solved, methods and contribution suitable for the general ICRA audience. Significant experimental validations made for a compelling record of the contribution.
IEEE ICRA Best Paper Award in Robotic Vision
Interval-Based Visual-LiDAR Sensor Fusion
Raphael Voges and Bernardo Wagner
- The paper proposes to use interval analysis to propagate the error from the input sources to the fused information in a straightforward way. To show the applicability of our approach, the paper uses the fused information for dead reckoning. An evaluation using real data shows that the proposed approach localizes the robot in a guaranteed way.
IEEE ICRA Best Paper Award in Service Robotics
Compact Flat Fabric Pneumatic Artificial Muscle (ffPAM) for Soft Wearable Robotic Devices
Woojong Kim, Hyunkyu Park and Jung Kim
- This paper presents design and evaluation of a novel flat fabric pneumatic artificial muscle with embedded sensing. Experimental results clearly demonstrate that the innovative ffPAM is durable, compact, and has great potential to advance broader application of wearable service robots.
IEEE ICRA Best Paper Award on Unmanned Aerial Vehicles
Aerial Manipulator Pushing a Movable Structure Using a DOB-Based Robust Controller
Dongjae Lee, Hoseong Seo, Inkyu Jang,Seung Jae Lee and H. Jin Kim
- This paper provides a robust control approach that maintains UAV stability through manipulator contact forces during pushing. It contributes control design along with convincing experimental validation on manipulated objects of unknown size and dynamics. The approach provides practical utility for unmanned aerial manipulation with contact forces.
IEEE ICRA Best Student Paper Award
Unsupervised Learning of Lidar Features for Use in a Probabilistic Trajectory Estimator
David Juny Yoon, Haowei Zhang, Mona Gridseth, Hugues Thomas and Timothy Barfoot
- The paper presents an unsupervised parameter learning approach in the context of Gaussian variational inference. The approach is innovative and sound. It has been well evaluated using open benchmark datasets. The paper has a broad impact on autonomous navigation.
IEEE ICRA Best Conference Paper Award
Extrinsic Contact Sensing with Relative-Motion Tracking from Distributed Tactile Measurements
Daolin Ma, Siyuan Dong and Alberto Rodriguez
- The paper makes a notable contribution to the important and re-emerging field of tactile perception by solving the problem of contact localization between an unknown object held by an imprecise grasp and the unknown environment with which it is in contact. This paper represents an excellent theory-to-practice exercise as the novel proposal of using extrinsic tactile array data to infer contact is verified with a new tactile sensor and real robotic manipulation in a simplified, but realistic environment. The authors also provide a robust and honest discussion of results, both positive and negative, for reader evaluation.
ICRA 2022 Conference Editorial Board Awards
Creating a world class technical program for ICRA requires the contributions of many. With the following awards, IEEE RAS recognizes individuals who provided outstanding contributions to the ICRA Conference Editorial Board, which is responsible for reviewing submissions to ICRA.
Best Associate Editor Award
- Patrick Wensing - University of Notre Dame, USA
- Raffaella Carloni - University of Groningen, the Netherlands
- Shengyong Chen - Tianjin University of Technology, China
- Luca Carlone - Massachusetts Institute of Technology, USA
Best Reviewer Award
- Mathias Lechner - Institute of Science and Technology Austria, Austria
- Hadas Kress-Gazit - Cornell University, USA
- Zhang Yinlong - University of Texas at San Antonio, USA
- Justin Yim - University of California, Berkeley, USA
Call for papers for RA-L Special Issue on Variable Impedance Control And Learning In Complex Interaction Scenarios: Challenges And Opportunities
Motivation
Advancements in robotics research are allowing robots to move from traditional caged environments on factory floors into human environments, which are highly unstructured, dynamic, and uncertain. Such a move requires robots to autonomously interact with their environment and physically cooperate with people, which significantly increases the demand for reliable perception, planning and control. However, there are still several fundamental research problems that must addressed to ensure the success of robots in human-inhabited environment, for example: how to design physical interaction control systems that can work with potentially uncertain environment models and uncertain sensory feedback; how to deal with unpredictable and complex physical interactions with human beings; and how to adapt the robot dynamic behavior in real-time.
This special issue aims at collecting different points of view about learning and impedance control. In principle, the combination of these two tools can afford robots the ability to enhance their manipulation and locomotion skills in unstructured environments, as well as their capacity to handle perturbations and uncertainty during physical interaction. Enabling robots to acquire knowledge autonomously and use it to interact with the world around them more intelligently will lead to future developments in this area, enforcing safety and reliability while building upon the principles of AI.
List of topics
Topics of interest for this special issue include and are not limited to:
- Variable impedance control (VIC).
- Low-level control of variable impedance.
- Human impedance.
- Physical human-robot cooperation.
- Physical interaction control.
- VIC from geometry awareness and manifold learning perspective.
- Variable and optimal impedance strategies for manipulation and locomotion.
Timeline
The special issue will follow the following timeline:
|
1 October 2021 |
Call for Papers |
|
1 February 2022 |
Papercept open for submission |
|
24 February 2022 |
Submission deadline |
|
21 May 2022 |
Authors receive RA-L reviews and recommendation |
|
4 June 2022 |
Authors of accepted MS submit final RA-L version |
|
20 June 2022 |
Authors of R&R MS resubmit revised MS |
|
25 July 2022 |
Authors receive final RA-L decision |
|
8 Aug 2022 |
Authors submit final RA-L files |
|
13 Aug 2022 |
Camera ready version appears in RA-L on Xplore |
|
23 Aug 2022 |
Final Publication |
For more information- https://www.ieee-ras.org/publications/ra-l/special-issues/cfp-variable-impedance-control-and-learning-in-complex-interaction-scenarios-challenges-and-opportunities
After a successful pilot, RAS in 2021 launched an expanded Developing Country Faculty Engagement Program. The goal of the program is to help faculty in developing countries compete successfully in publishing their research at top RAS conferences and journals by connecting them with assigned RAS mentors.
Priority for acceptance to the program was given to faculty members from a university or college located in an IEEE identified developing country. Applicants were also required to be RAS members with research experience in robotics and automation.
Each developing country faculty member (the mentee) will be supported for up to two years to work with a mentor. RAS will fund the collaboration according to an approved proposal and budget submitted by the mentee and mentor.
Some of the responsibilities of the mentee include:
- Write co-authored RAS conference/journal papers (with mentor) based on research
- Write a paper as a lead author towards the end of the mentorship period
- Become involved in the mentor’s research activities, including group meetings and seminars
- Create or expand a local RAS student chapter
- Visit mentor’s lab (if possible) and regularly join mentor’s lab meetings
- Attend an RAS conference to present a paper
- Establish collaboration with researchers during an RAS conference
- Yearly joint report by the mentor and mentee regarding their accomplishments
2021 Awardees
|
MENTEE |
MENTOR |
PROJECT |
|
Moctar Mossi Idrissa Abdou Moumouni University of Niamey, Niger |
Volkan Isler University of Minnesota, USA |
Crops/Weeds Classification from Aerial Imagery |
|
Koena Mukherjee National Institute of Technology, Silchar, India |
Nancy Amato and Marco Morales University of Illinois Urbana-Champaign, USA |
Task and Motion Planning for search and rescue operation with a particular focus on sampling-based methods |
|
Issarapong Khuankrue King Mongkut’s University of Technology Thonburi, Thailand |
Subramanian Ramamoorthy University of Edinburgh, UK |
Teaching the Robot by Guidance: Developing the human-robot collaboration with a cognitive architecture model |
|
Syed Tanweer Shah Bukhari University of South Asia, Pakistan |
Emily Hand and David Feil-Seifer University of Nevada, Reno, USA |
Control Framework for Human Robot Interaction using Cognitive Robots |
|
Hassan Jaleel Lahore University of Management Sciences, Pakistan |
Jeff S. Shamma University of Illinois Urbana-Champaign, USA |
Distributed Multi-robot Coordination Under Adversarial Environments |
|
Francisco Cuellar Pontifical Catholic University of Peru, Peru |
Marcelo H Ang Jr National University of Singapore, Singapore |
Autonomous robots in underground mining: the implementation and validation of mobile robots to identify risks of falling objects in underground mining |
The following RAS Volunteers were instrumental in creating and implementing this program.
- Jyh-Ming Lien, George Mason University - USA
- Tony Maciejewski, Colorado State University - USA
- Ron Lumia - Texas, USA
Congratulations to the IEEE Robotics and Automation Society members recently elevated to Senior Member status by the IEEE Admission and Advancement Senior Member Review Panel.
Congratulations and welcome to the following newly organized RAS Chapters:
SECTION CHAPTERS
Region 5 - 7
USA
- IEEE Lone Star Section, Robotics and Automation Society Chapter
- IEEE Boise Section Signal Processing and Robotics and Automation Joint Societies Chapter
- IEEE Metropolitan Los Angeles Section Robotics and Automation Society Chapter
Canada
- IEEE Kitchener-Waterloo Section Robotics and Automation Society Chapter
Region 9
Guatemala
- IEEE Guatemala Section, Robotics and Automation Society Chapter
Mexico
- IEEE Guadalajara Section Robotics and Automation Society Chapter
Region 10
China
- IEEE Beijing Section, Systems, Man, and Cybernetics and Robotics and Automation Joint Societies Chapter
India
- IEEE Hyderabad Section, Robotics and Automation Society Chapter
Philippines
- IEEE Republic of Philippines Section Robotics and Automation Society Chapter
STUDENT BRANCH CHAPTERS
Region 5
USA
- University of Texas-San Antonio Robotics and Automation Society Student Branch Chapter
Region 8
Egypt
- Menoufia University Robotics and Automation Society Student Branch Chapter
- Pharos University in Alexandria Robotics and Automation Society Student Branch Chapter
Greece
- Democritus University of Thrace Robotics and Automation Society Student Branch Chapter
Jordan
- Tafila Technical University, Robotics and Automation Society Student Branch Chapter
Kenya
- University of Nairobi, Robotics and Automation Society Student Branch Chapter
Palestine
- An-Najah National University Robotics and Automation Society Student Branch Chapter
Romania
- Politehnica University of Bucharest, Robotics and Automation Society Student Branch Chapter
Tunisia
- Faculty of Science of Tunis, Robotics and Automation Society Student Branch Chapter
- Higher Institute of Applied Sciences and Technology (ISSATM), Robotics and Automation Society Student Branch Chapter
- Higher School of Sciences and Technologies Hammam Sousse, Robotics and Automation Society Student Branch Chapter
- Institute of Technological Studies of Bizerte, Robotics and Automation Society Student Branch Chapter
- National Higher Engineering School of Tunis (ENSIT), Robotics and Automation Society Student Branch Chapter
- Polytechnique Sfax, Robotics and Automation Society Student Branch Chapter
Turkey
- Istanbul Sabahattin Zaim Universitesi, Robotics and Automation Society Student Branch Chapter
- Istanbul Technical University, Robotics and Automation Society Student Branch Chapter
Region 9
Brazil
- Universidad Estadual Paulista, Robotics and Automation Society Student Branch Chapter
- Universidad Federal do Espirito Santo-Sao Mateus, Robotics and Automation Society Student Branch Chapter
Colombia
- Universidad Sergio Arboleda, Engineering in Medicine and Biology and Robotics and Automation Joint Societies Student Branch Chapter
El Salvador
- Universidad de Sonsonate, Robotics and Automation Society Student Branch Chapter
Mexico
- Instituto Tecnologico De Hermosillo, Robotics and Automation Society Student Branch Chapter.
- Universidad Autonoma del Estado de Mexico, Robotics and Automation Society Student Branch Chapter
Peru
- Universidad Nacional de Trujillo, Robotics and Automation Society Student Branch Chapter
Region 10
Australia
- University of New South Wales, Robotics and Automation and Engineering in Medicine and Biology Societies Student Branch Chapter
Bangladesh
- Bangladesh University of Business and Technology, Robotics and Automation Society Student Branch Chapter
- BRAC University, Robotics and Automation Society Student Branch Chapter
- International Islamic University Chittagong, Robotics and Automation Society Student Branch Chapter
- University of Liberal Arts-Bangladesh, Robotics and Automation Society Student Branch Chapter
India
Bangalore Section
- GSSS Institute of Engineering and Technology for Women, Robotics and Automation Society Student Branch Chapter
- Manipal Institute of Technology, Robotics and Automation Society Student Branch Chapter
- National Institute of Technology-Karnataka, Robotics and Automation Society Student Branch Chapter
- Rashtreeya Vidyalaya College of Engineering, Robotics and Automation Society Student Branch Chapter
- Sri Jayachamarajendra College of Engineering, Robotics and Automation Society Student Branch Chapter
- Vidya Vardhaka College of Engineering, Robotics and Automation Society Student Branch Chapter
- Vidya Vikas Institute of Engineering and Technology, Robotics and Automation
Bombay Section
- Shri Sant Gajanan Maharaj College of Engineering, Robotics and Automation Society Student Branch Chapter
Delhi Section
- YMCA University of Science and Technology – Faridabad, Robotics and Automation Society Student Branch Chapter
Gujarat Section
- G H Patel College of Engineering and Technology, Robotics and Automation Society Student Branch Chapter
- University of Rajshahi, Robotics and Automation Society Student Branch Chapter
Hyderabad Section
- Nawab Shah Alam Khan College of Engineering and Technology, Robotics and Automation Society Student Branch Chapter
- Sreyas Institute of Engineering and Technology, Robotics and Automation Society Student Branch Chapter
- Vardhaman College of Engineering-Shamshabad Robotics and Automation Society Student Branch Chapter
Kerala Section
- Ahalia School of Engineering and Technology, Robotics and Automation Society Student Branch Chapter
- College of Engineering-Perumon, Robotics and Automation Society Student Branch Chapter
- Mar Athanasius College of Engineering Robotics and Automation Society Student Branch Chapter
- Muthoot Institute of Technology and Science Robotics and Automation Society Student Branch Chapter
- Rajagiri School of Engineering and Technology, Robotics and Automation Society Student Branch Chapter
- St Joseph's College of Engineering and Technology-Palai, Robotics and Automation Society Student Branch Chapter
- Toc H Institute of Science and Technology (TIST), Robotics and Automation Society Student Branch Chapter
Madras Section
- Sri Sai Ram Engineering College, Robotics and Automation Society Student Branch Chapter
Uttar Pradesh Section
- Bipin Tripathi Kumaon Institute of Technology, Robotics and Automation Society Student Branch Chapter
- Dewan VS Group of Institutes, Robotics and Automation Society Student Branch Chapter
- JSS Academy of Technical Education - Noida
- Pranveer Singh Institute of Technology, Robotics and Automation Society Student Branch Chapter
- Vidya Vikas Institute of Engineering and Technology, Robotics and Automation Society Student Branch Chapter (Bangalore Section)
Pakistan
- Sir Syed Center for Advanced Studies in Engineering Institute of Technology, Robotics and Automation Society Student Branch Chapter
Sri Lanka
- University of Jaffna, Robotics and Automation Society Student Branch Chapter
- Uva Wellassa University, Robotics and Automation Society Student Branch Chapter
Heartfelt congratulations to Pieter Abbeel, selected recipient of the prestigious 2022 IEEE Kiyo Tomiyasu Award "for contributions to deep learning for robotics." He will receive this award during the 2022 IEEE International Conference on Robotics and Automation (ICRA) in Philadelphia, (PA) USA on 23-27 May 2022.

Striving to build ever-more intelligent systems, Pieter Abbeel is paving the way to the next generation of robots that can learn and improve to function outside of traditional manufacturing settings. Abbeel helped start the field of robot learning by cleverly combining learning and optimal control for hard tasks including helicopter flight, manipulating cloth, and surgical knot-tying. He then applied deep learning to robotics by incorporating aspects of reinforcement learning, imitation learning, and unsupervised learning to enable AI-powered robots that have the potential to sense and react to their environment and meaningfully reason through the consequences of their actions in real time. These robots are now playing a role in warehouse order fulfillment, logistics, and supply-chain applications critical to e-commerce.
An IEEE Fellow, Abbeel is a professor and director of the Berkeley Robot Learning Lab at the University of California Berkeley, Berkeley, CA, USA.
More About the IEEE Kiyo Tomiyasu Award

The IEEE Kiyo Tomiyasu Award was established in 2001 by the IEEE Board of Directors, and is presented for outstanding early to mid-career contributions to technologies holding the promise of innovative applications. The award consists of a bronze medal, certificate, and cash honorarium. In the evaluation process, the following criteria are considered: innovation or development, social value, uniqueness of concept, other technical accomplishments, and the quality of the nomination.
Past Recipients can be found HERE
Heartfelt congratulations to Wolfram Burgard, selected recipient of the prestigious 2022 IEEE Robotics and Automation Award "for contributions to the fundamentals and applications of robot navigation and perception." He will receive this award during the 2022 IEEE International Conference on Robotics and Automation (ICRA) in Philadelphia, (PA) USA on 23-27 May 2022.

A pioneer of robust and adaptive techniques for robot perception, navigation, and manipulation, Wolfram Burgard has addressed the most relevant challenges facing autonomous mobile robotics applications ranging from vacuum cleaners to self-driving cars. Burgard led the original contributions pertaining to simultaneous localization and mapping (SLAM) and robot learning, resulting in algorithms including the grid-based FastSLAM. His g2o tool is one of the most efficient solvers for SLAM issues facing autonomous systems. He developed several robots that operated robustly in challenging real-world environments, including Rhino and Minerva, which acted as interactive museum tour guides; Obelix, which autonomously navigated like a pedestrian through the city of Freiburg, Germany; and a self-driving car that could navigate through a complex parking garage and park itself.
An IEEE Fellow, Burgard is a professor with the Department of Computer Science at the University of Freiburg, Baden, Wurttemberg, Germany.
More About the IEEE Robotics and Automation Technical Field Award

The IEEE Robotics and Automation Technical Field Award was established in 2002 by the IEEE Board of Directors, and is presented for contributions in the field of robotics and automation. It includes but is not limited to: manufacturing automation; robotics and automation in unstructured environments; sensor design; integration and fusion; robot design; modeling; planning and control; methodologies for robotics and automation, and the quality of the nomination. This Award is sponsored by the IEEE Robotics & Automation Society.
Past Recipients can be found HERE
Produced annually by Robohub, the "50 Women in Robotics You Need to Know About – 2021 Edition" honors ELEVEN members of IEEE Robotics and Automation Society!
![]()
We’re delighted to introduce you to “50 women in robotics you need to know about”! From the Afghanistan Girls Robotics Team to K.G.Engelhardt who in 1989 founded, and was the first Director of, the Center for Human Service Robotics at Carnegie Mellon, these women showcase a wide range of roles in robotics. We hope these short bios will provide a world of inspiration, in our ninth Women in Robotics list!.
The following IEEE Robotics & Automation Society women are included in this year's list:
- Estela Bicho - University of Minho, Portugal
- Jessica Burgner-Kahrs - University of Toronto, Canada.
- Maria Pia Fanti - Politecnico di Bari, Italy
- Serena Ivaldi - INRIA Nancy Grand-Est, France
- Elizabeth Jochum – Aalborg University, Denmark
- Ming Lin - University of Maryland, USA
- Laurel Riek - University of California, San Diego, USA
- Carma Torras - Polytechnic University of Catalonia, Spain
- Antonia Tzemanaki - University of Bristol, United Kingdom
- Gentiane Venture - Tokyo University of Agriculture and Technology, Japan
- Birgit Vogel-Heuser - Technical University of Munich, Germany
Please visit the full article to read more about all of these amazing women!
https://robohub.org/50-women-in-robotics-you-need-to-know-about-2021/
13 Candidates vie for RAS AdCom seats--voting starts 13 October 2021

Candidates from RAS Geographical Area 1 (IEEE Regions, 1, 2, 3, 4, 5, 6, 7, 9)- Americas

Urbana (IL), USA

Montreal, Canada

West Lafayette (IN), USA

Worcester (MA), USA
Candidates from RAS Geographical Area 2 (IEEE Region 8)- Europe, Middle East & Africa

Genova, Italy

London, UK

Karlsruhe, Germany

Gothenburg, Sweden

Munich, Germany
Candidates from RAS Geographical Area 3 (IEEE Region 10)- Asia & Pacific Rim

Tokyo, Japan

Seoul, Korea

Tokyo, Japan

Tokyo, Japan
Congratulations to all award recipients of IEEE International Conference on Automation Science and Engineering (CASE 2021)!
All Finalist papers and corresponding videos can be viewed on the CASE website here: https://case2021.sciencesconf.org/resource/page/id/37
IEEE CASE Best Conference Paper Award
Extended Fabrication-Aware Convolution Learning Framework for Predicting 3D Shape Deformation in Additive Manufacturing
Yuanxiang Wang, Cesar Ruiz, Qiang Huang
IEEE CASE Best Student Paper Award
Designing a User-Centred and Data-Driven Controller for Pushrim-Activated Power-Assisted Wheels: A Case Study
Mahsa Khalili, H.F. Machiel Van der Loos, Jaimie Borisoff
IEEE CASE Best Application Paper Award
A Seamless Workflow for Design and Fabrication of Multimaterial Pneumatic Soft Actuators
Lawrence Smith, Travis Hainsworth, Zachary Jordan, Xavier Bell, Robert MacCurdy
IEEE CASE Best Healthcare Automation Paper Award
Hospital Beds Planning and Admission Control Policies for COVID-19 Pandemic: A Hybrid Computer Simulation Approach
Yiruo Lu, Yongpei Guan, Xiang Zhong, Jennifer Fishe, Thanh Hogan
The IEEE Robotics and Automation Society (RAS) Standing Committee for Standards Activities is happy to announce the approval of two new standards, and the creation of two new Working Groups. Please contact us if you want to get involved in future efforts!
Newly Approved Standards
- RAS/SC 7007: Ontological Standard for Ethically Driven Robotics and Automation Systems – This standard contains a set of ontologies that represents norms and ethical principles; data privacy and protection; transparency and accountability; and ethical violation management for robotics and automation systems. The standard can be purchased by going to https://www.techstreet.com/ieee/standards/ieee-p7007?product_id=2217375. This working group will also be honored with the IEEE Standards Association (SA) Emerging Technology Award at the upcoming IEEE SA awards ceremony.
- RAS/SC 1872.2: Standard for Autonomous Robotics (AuR) Ontology – This standard extends IEEE 1872-2015 Standard for Ontologies for Robotics and Automation to represent additional domain-specific concepts, definitions, and axioms commonly used in Autonomous Robotics (AuR). This standard is general and can be used in many ways - for example, to specify the domain knowledge needed to unambiguously describe the design patterns of AuR systems, to represent AuR system architectures in a unified way, or as a guideline to build autonomous systems consisting of robots operating in various environments. The standard can be purchased by going to https://www.techstreet.com/ieee/standards/ieee-p1872-2?product_id=2225832
Formation of two new Standards Working Groups
- P3107: Standard Terminology for Human-Robot Interaction - This standard will establish and define a common terminology for practitioners and users of human-robot interaction (HRI) technologies. This standard is intended to address issues common within the field of HRI, particularly surrounding the use of inconsistent and/or conflicting terms and definitions. More information can be found at https://standards.ieee.org/project/3107.html or by contacting the working group leader, Jeremy Marvel, at jeremy.marvel@nist.gov.
- P3108: Recommended Practice for Human-Robot Interaction Design of Human Subject Studies - This recommended practice will provide best practices and requirements for designing and executing human-subject studies in human-robot interaction (HRI) research. This recommended practice will be particularly aimed at providing guidance for emerging researchers in the associated fields of HRI, as well as establishing a baseline methodology that supports replicability in HRI research. More information can be found at https://standards.ieee.org/project/3108.html or by contacting the working group leader, Shelly Bagchi, at shelly.bagchi@nist.gov.
Learn More
More information about other IEEE RAS standards efforts can be found at https://www.ieee-ras.org/industry-government/standards/ or by contacting the IEEE RAS Associate Vice President of Standardization, Craig Schlenoff, at craig.schlenoff@nist.gov.

FOR OUTSTANDING ACHIEVEMENTS IN COMMERCIALIZING INNOVATIVE ROBOTICS AND AUTOMATION TECHNOLOGY
WHO SHOULD APPLY?
The purpose of this award is to highlight and honor the achievements of the inventors with value creating ideas and entrepreneurs who propel those ideas into world-class products. This is a key element to the continuing success of robotics and automation today. Active infusion of innovation and entrepreneurship into technological advancement is regarded critical at this juncture to strengthen a healthy balance between research and practice as well as a healthy growth of industrial and commercial sectors in robotics and automation.
In a joint event the IEEE Robotics and Automation Society and the International Federation of Robotics will therefore recognize and honor outstanding personal achievements of entrepreneurs in the commercialization of innovative robotic and automation technology.
These achievements will be recognized in a specially organized IEEE/IFR Joint Forum on Innovation and Entrepreneurship in Robotics and Automation, which is being held in conjunction with the International Symposium on Robotics ISR in June 2022 in Munich, Germany.
The selected finalists will have the opportunity to present their story of the genesis of 2022 jointly sponsored by a successful innovative product in robotics and automation from its very inception to the final state of commercialization in a series of plenary lectures. The ultimate winner will be chosen by an evaluation board consisting of distinguished individuals from industry and academia.
A certificate will be awarded to each finalist and prestigious plaque and a US$ 2,000 prize will be awarded to the winner.
HOW TO APPLY?
Applications should describe the original work that already has been translated into a commercial success (which can be bought or ordered). The application must include
statements regarding:
Applications should not exceed a maximum length of 5 pages. Product descriptions and public relation material will not be accepted as an application. References and links to online material are permitted.
Please send as PDF document (< 10 MB) no later than 28 February 2022 either to secretariat@ifr.org or to RAS@ieee.org.
The IEEE 7007 Ontologies for Ethically Driven Robotics and Automation Working Group (IEEE 7007 WG) has been selected as a recipient of the IEEE SA Emerging Technology Award “For developing an innovative ontological standard on the ethics of artificial intelligence.”
IEEE 7007 WG created a unique standard that will contribute to the development of new technologies ethically aligned to human values. The IEEE 7007 Standard has an ontological representation which facilitates the investigation of the domain; and a formal language that adds precision to the knowledge and data collected during this investigation. The nature of the ontologies allows this ontological representation to be used in a wide variety of applications across all AIS domain.
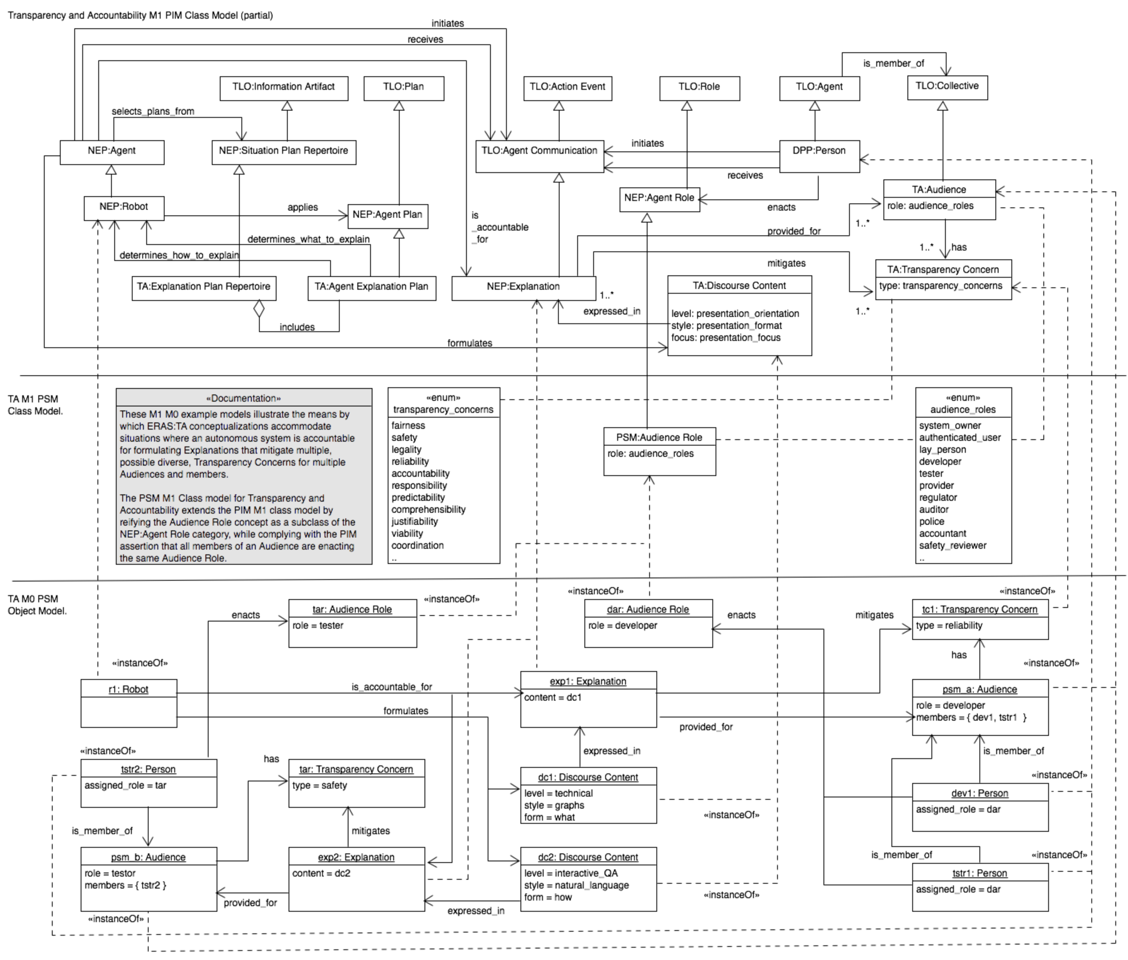
The IEEE 7007 WG invested a lot of time over the past four years to conceptualize the components, identify their dependences and elaborate upon the formal representation, using formal Logics, for the following domains: Norms and Ethical Principles, Data Privacy and Protection, Transparency and Accountability, and Ethical Violation Management. In addition, during the elaboration of 7007 Standard, IEEE 7007 WG developed its own methodology to deal with the complexity of the Ethics of AI domain. It is based on agile methodology and can be used in heterogenous and spatially distributed groups like the IEEE 7007 WG.
The IEEE 7007 Standard can contribute to the advance of the use of Ethics in the design and deployment of Autonomous and Intelligent Systems (AIS) in multiple ways.
• It can be used to teach ethical design because the ontology permits the user to analyze in detail the components necessary to create ethically aligned systems;
• It can be used for both human and institutional capacity building in the AIS domain. This domain is of increasing interest not only by tech companies but also by States.
• It can be used to create computational ethically aligned systems due to its formal representation. It is possible to embed the standard in an AIS; and enable it to communicate with others through use of the ontology’s formal representation.
• It can provide a taxonomy to support the elaboration of public policies. Precise definitions are essential to provide accurate semantics and disambiguate the meanings of the terms when they are being discussed by different stakeholders.
• It can be used to strengthen digital cooperation across States, which is at the core of United Nations.
The chair of the group is Edson Prestes; the vice-chair is Sandro Fiorini; the technical editors are Mike Houghtaling and Babita Ramlal; the secretary is Paulo J.S. Gonçalves.
A partial view of the Transparency and Accountability UML Model:
Special Issue on Biomimetic Perception, Cognition, and Control: From Nature to Robots
This special issue will cover the subjects including intelligent sensors, biomimetic mechanical design, robotic cognition-related learning, bioinspired control, and human-friendly interaction. This issue will focus on recent progress and new multi-disciplinary biomimetic technologies that have practical potential and the potential for profound impact on the real world. We welcome submissions from all related topics in academic research and industry, including but not limited to the following:
- Intelligent sensors (e.g., vision, tactile etc.) for perception and exploration
- Mechanical design of biomimetic robots
- Advanced multimodal sensing information fusion
- Computational neuroscience of perception and action
- Intelligent learning methods from a biomimetic view
- Learning from Demonstrations
- Bioinspired robotic learning and control
- Applications of biomimetic robotics in industry, e.g., manipulation, robot assisted surgery.
- Other related topics
Click here for more information and important dates.
Special Issue on Homecare Robots
The home healthcare industry is under growing pressure of delivering services more effectively within its already-stretched capacity. Especially, providing efficient, cost effective homecare for the growing number of older adults will require major changes in ways providers gather information from and deliver care services to care recipients. As many homebound older adults have been isolated in the COVID-19 pandemic, the need for innovations in the home healthcare industry is becoming more urgent.
Robots are in a unique position to monitor, assess/evaluate, and prevent situations that could put older adults at-risk. Research in robots, especially assistive robots and companion robots, has been attracting growing interest in recent years. Robot-based homecare technologies can record health-related data with advanced sensors, and then automatically process the data and provide personalized advice or automated actions. For healthcare workers, these technologies allow for more comprehensive monitoring and free them to address the more complex aspects of their work. These technologies also make possible individualized care that promotes independence and safety of the care recipients.
The goal of this special issue is to provide readers an overview of the state of the art in robot-assisted home healthcare, identify and promote the future research direction sin this emerging field. By presenting the achievement and future opportunities in this multidisciplinary research area that crosscuts robotics, automation, AI and healthcare, this special issue will have great impact on the robotics and automation research community.
Click here for more information and important dates.
Call for Expressions of Interest for the role Junior Co-Chairs. The IEEE RAS TC on Model-Based Optimization for Robotics is seeking expressions of interest from those interested in becoming Junior Co-Chairs.
The role of the Junior Co-Chairs will be to assist with, and in some cases lead, the ongoing and future activities of the TC. Junior TC Co-Chairs will also be considered natural candidates to serve as Co-Chairs when the TC Co-Chairs rotate. Typically, Junior Co-Chairs will be early career researchers (e.g., senior PhD students or PostDocs), though we welcome all expressions of interest.
We are looking for keen and active researchers and practitioners from industry, government, or academia, especially those who actively participate in the RAS community (for example, attending conferences).
Expressions of interest outlining your motivation for becoming involved, together with a CV, should be submitted through the form https://forms.gle/8YaGtG6Vck8yMjGo8. If you have any questions about the role, please feel free to reach out to the Co-Chairs at tc.opt.rob@gmail.com.


