
Latest News
Produced annually by Robohub, the "50 Women in Robotics You Need to Know About – 2021 Edition" honors ELEVEN members of IEEE Robotics and Automation Society!
![]()
We’re delighted to introduce you to “50 women in robotics you need to know about”! From the Afghanistan Girls Robotics Team to K.G.Engelhardt who in 1989 founded, and was the first Director of, the Center for Human Service Robotics at Carnegie Mellon, these women showcase a wide range of roles in robotics. We hope these short bios will provide a world of inspiration, in our ninth Women in Robotics list!.
The following IEEE Robotics & Automation Society women are included in this year's list:
- Estela Bicho - University of Minho, Portugal
- Jessica Burgner-Kahrs - University of Toronto, Canada.
- Maria Pia Fanti - Politecnico di Bari, Italy
- Serena Ivaldi - INRIA Nancy Grand-Est, France
- Elizabeth Jochum – Aalborg University, Denmark
- Ming Lin - University of Maryland, USA
- Laurel Riek - University of California, San Diego, USA
- Carma Torras - Polytechnic University of Catalonia, Spain
- Antonia Tzemanaki - University of Bristol, United Kingdom
- Gentiane Venture - Tokyo University of Agriculture and Technology, Japan
- Birgit Vogel-Heuser - Technical University of Munich, Germany
Please visit the full article to read more about all of these amazing women!
https://robohub.org/50-women-in-robotics-you-need-to-know-about-2021/
13 Candidates vie for RAS AdCom seats--voting starts 13 October 2021

Candidates from RAS Geographical Area 1 (IEEE Regions, 1, 2, 3, 4, 5, 6, 7, 9)- Americas

Urbana (IL), USA

Montreal, Canada

West Lafayette (IN), USA

Worcester (MA), USA
Candidates from RAS Geographical Area 2 (IEEE Region 8)- Europe, Middle East & Africa

Genova, Italy

London, UK

Karlsruhe, Germany

Gothenburg, Sweden

Munich, Germany
Candidates from RAS Geographical Area 3 (IEEE Region 10)- Asia & Pacific Rim

Tokyo, Japan

Seoul, Korea

Tokyo, Japan

Tokyo, Japan
Congratulations to all award recipients of IEEE International Conference on Automation Science and Engineering (CASE 2021)!
All Finalist papers and corresponding videos can be viewed on the CASE website here: https://case2021.sciencesconf.org/resource/page/id/37
IEEE CASE Best Conference Paper Award
Extended Fabrication-Aware Convolution Learning Framework for Predicting 3D Shape Deformation in Additive Manufacturing
Yuanxiang Wang, Cesar Ruiz, Qiang Huang
IEEE CASE Best Student Paper Award
Designing a User-Centred and Data-Driven Controller for Pushrim-Activated Power-Assisted Wheels: A Case Study
Mahsa Khalili, H.F. Machiel Van der Loos, Jaimie Borisoff
IEEE CASE Best Application Paper Award
A Seamless Workflow for Design and Fabrication of Multimaterial Pneumatic Soft Actuators
Lawrence Smith, Travis Hainsworth, Zachary Jordan, Xavier Bell, Robert MacCurdy
IEEE CASE Best Healthcare Automation Paper Award
Hospital Beds Planning and Admission Control Policies for COVID-19 Pandemic: A Hybrid Computer Simulation Approach
Yiruo Lu, Yongpei Guan, Xiang Zhong, Jennifer Fishe, Thanh Hogan
The IEEE Robotics and Automation Society (RAS) Standing Committee for Standards Activities is happy to announce the approval of two new standards, and the creation of two new Working Groups. Please contact us if you want to get involved in future efforts!
Newly Approved Standards
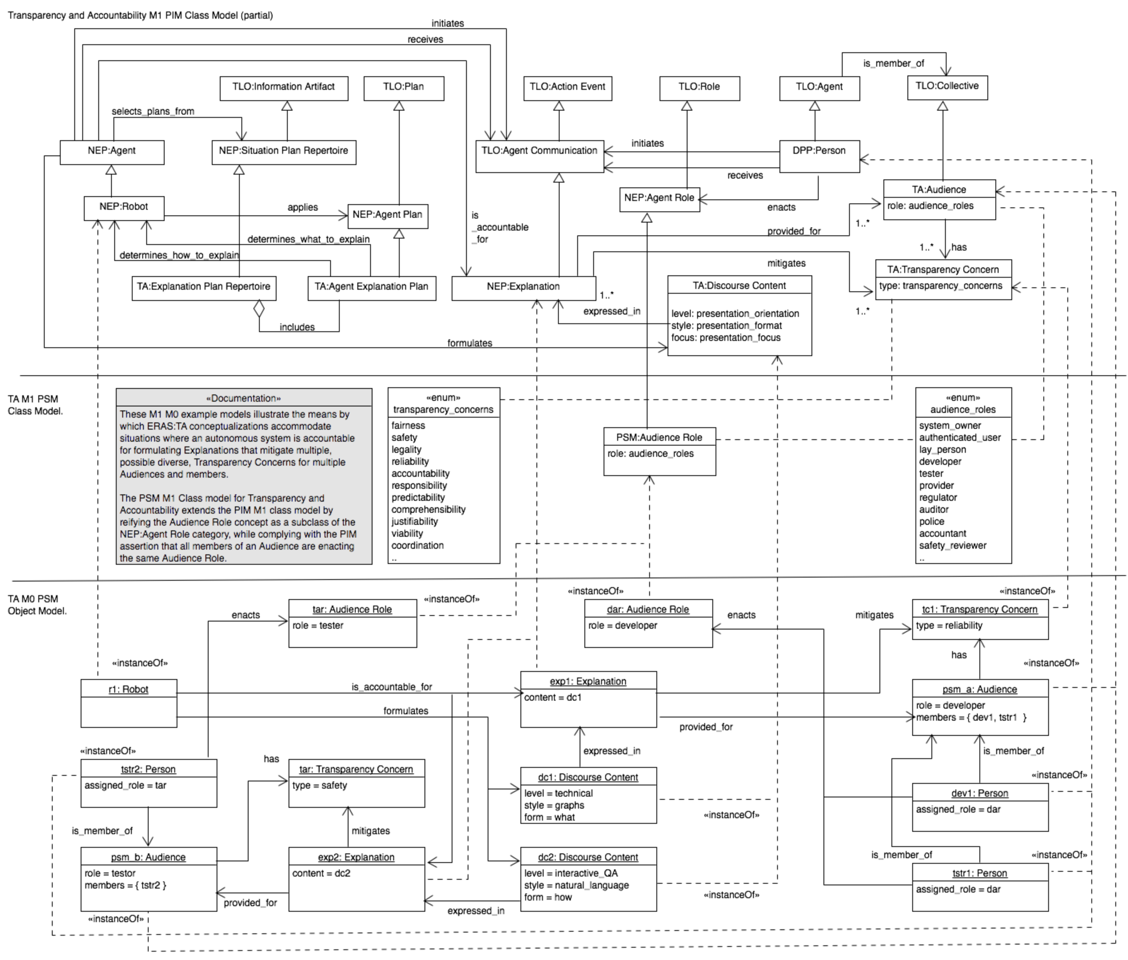
- RAS/SC 7007: Ontological Standard for Ethically Driven Robotics and Automation Systems – This standard contains a set of ontologies that represents norms and ethical principles; data privacy and protection; transparency and accountability; and ethical violation management for robotics and automation systems. The standard can be purchased by going to https://www.techstreet.com/ieee/standards/ieee-p7007?product_id=2217375. This working group will also be honored with the IEEE Standards Association (SA) Emerging Technology Award at the upcoming IEEE SA awards ceremony.
- RAS/SC 1872.2: Standard for Autonomous Robotics (AuR) Ontology – This standard extends IEEE 1872-2015 Standard for Ontologies for Robotics and Automation to represent additional domain-specific concepts, definitions, and axioms commonly used in Autonomous Robotics (AuR). This standard is general and can be used in many ways - for example, to specify the domain knowledge needed to unambiguously describe the design patterns of AuR systems, to represent AuR system architectures in a unified way, or as a guideline to build autonomous systems consisting of robots operating in various environments. The standard can be purchased by going to https://www.techstreet.com/ieee/standards/ieee-p1872-2?product_id=2225832
Formation of two new Standards Working Groups
- P3107: Standard Terminology for Human-Robot Interaction - This standard will establish and define a common terminology for practitioners and users of human-robot interaction (HRI) technologies. This standard is intended to address issues common within the field of HRI, particularly surrounding the use of inconsistent and/or conflicting terms and definitions. More information can be found at https://standards.ieee.org/project/3107.html or by contacting the working group leader, Jeremy Marvel, at jeremy.marvel@nist.gov.
- P3108: Recommended Practice for Human-Robot Interaction Design of Human Subject Studies - This recommended practice will provide best practices and requirements for designing and executing human-subject studies in human-robot interaction (HRI) research. This recommended practice will be particularly aimed at providing guidance for emerging researchers in the associated fields of HRI, as well as establishing a baseline methodology that supports replicability in HRI research. More information can be found at https://standards.ieee.org/project/3108.html or by contacting the working group leader, Shelly Bagchi, at shelly.bagchi@nist.gov.
Learn More
More information about other IEEE RAS standards efforts can be found at https://www.ieee-ras.org/industry-government/standards/ or by contacting the IEEE RAS Associate Vice President of Standardization, Craig Schlenoff, at craig.schlenoff@nist.gov.

FOR OUTSTANDING ACHIEVEMENTS IN COMMERCIALIZING INNOVATIVE ROBOTICS AND AUTOMATION TECHNOLOGY
WHO SHOULD APPLY?
The purpose of this award is to highlight and honor the achievements of the inventors with value creating ideas and entrepreneurs who propel those ideas into world-class products. This is a key element to the continuing success of robotics and automation today. Active infusion of innovation and entrepreneurship into technological advancement is regarded critical at this juncture to strengthen a healthy balance between research and practice as well as a healthy growth of industrial and commercial sectors in robotics and automation.
In a joint event the IEEE Robotics and Automation Society and the International Federation of Robotics will therefore recognize and honor outstanding personal achievements of entrepreneurs in the commercialization of innovative robotic and automation technology.
These achievements will be recognized in a specially organized IEEE/IFR Joint Forum on Innovation and Entrepreneurship in Robotics and Automation, which is being held in conjunction with the International Symposium on Robotics ISR in June 2022 in Munich, Germany.
The selected finalists will have the opportunity to present their story of the genesis of 2022 jointly sponsored by a successful innovative product in robotics and automation from its very inception to the final state of commercialization in a series of plenary lectures. The ultimate winner will be chosen by an evaluation board consisting of distinguished individuals from industry and academia.
A certificate will be awarded to each finalist and prestigious plaque and a US$ 2,000 prize will be awarded to the winner.
HOW TO APPLY?
Applications should describe the original work that already has been translated into a commercial success (which can be bought or ordered). The application must include
statements regarding:
Applications should not exceed a maximum length of 5 pages. Product descriptions and public relation material will not be accepted as an application. References and links to online material are permitted.
Please send as PDF document (< 10 MB) no later than 28 February 2022 either to secretariat@ifr.org or to RAS@ieee.org.
The IEEE 7007 Ontologies for Ethically Driven Robotics and Automation Working Group (IEEE 7007 WG) has been selected as a recipient of the IEEE SA Emerging Technology Award “For developing an innovative ontological standard on the ethics of artificial intelligence.”
IEEE 7007 WG created a unique standard that will contribute to the development of new technologies ethically aligned to human values. The IEEE 7007 Standard has an ontological representation which facilitates the investigation of the domain; and a formal language that adds precision to the knowledge and data collected during this investigation. The nature of the ontologies allows this ontological representation to be used in a wide variety of applications across all AIS domain.
The IEEE 7007 WG invested a lot of time over the past four years to conceptualize the components, identify their dependences and elaborate upon the formal representation, using formal Logics, for the following domains: Norms and Ethical Principles, Data Privacy and Protection, Transparency and Accountability, and Ethical Violation Management. In addition, during the elaboration of 7007 Standard, IEEE 7007 WG developed its own methodology to deal with the complexity of the Ethics of AI domain. It is based on agile methodology and can be used in heterogenous and spatially distributed groups like the IEEE 7007 WG.
The IEEE 7007 Standard can contribute to the advance of the use of Ethics in the design and deployment of Autonomous and Intelligent Systems (AIS) in multiple ways.
• It can be used to teach ethical design because the ontology permits the user to analyze in detail the components necessary to create ethically aligned systems;
• It can be used for both human and institutional capacity building in the AIS domain. This domain is of increasing interest not only by tech companies but also by States.
• It can be used to create computational ethically aligned systems due to its formal representation. It is possible to embed the standard in an AIS; and enable it to communicate with others through use of the ontology’s formal representation.
• It can provide a taxonomy to support the elaboration of public policies. Precise definitions are essential to provide accurate semantics and disambiguate the meanings of the terms when they are being discussed by different stakeholders.
• It can be used to strengthen digital cooperation across States, which is at the core of United Nations.
The chair of the group is Edson Prestes; the vice-chair is Sandro Fiorini; the technical editors are Mike Houghtaling and Babita Ramlal; the secretary is Paulo J.S. Gonçalves.
A partial view of the Transparency and Accountability UML Model:
Special Issue on Biomimetic Perception, Cognition, and Control: From Nature to Robots
This special issue will cover the subjects including intelligent sensors, biomimetic mechanical design, robotic cognition-related learning, bioinspired control, and human-friendly interaction. This issue will focus on recent progress and new multi-disciplinary biomimetic technologies that have practical potential and the potential for profound impact on the real world. We welcome submissions from all related topics in academic research and industry, including but not limited to the following:
- Intelligent sensors (e.g., vision, tactile etc.) for perception and exploration
- Mechanical design of biomimetic robots
- Advanced multimodal sensing information fusion
- Computational neuroscience of perception and action
- Intelligent learning methods from a biomimetic view
- Learning from Demonstrations
- Bioinspired robotic learning and control
- Applications of biomimetic robotics in industry, e.g., manipulation, robot assisted surgery.
- Other related topics
Click here for more information and important dates.
Special Issue on Homecare Robots
The home healthcare industry is under growing pressure of delivering services more effectively within its already-stretched capacity. Especially, providing efficient, cost effective homecare for the growing number of older adults will require major changes in ways providers gather information from and deliver care services to care recipients. As many homebound older adults have been isolated in the COVID-19 pandemic, the need for innovations in the home healthcare industry is becoming more urgent.
Robots are in a unique position to monitor, assess/evaluate, and prevent situations that could put older adults at-risk. Research in robots, especially assistive robots and companion robots, has been attracting growing interest in recent years. Robot-based homecare technologies can record health-related data with advanced sensors, and then automatically process the data and provide personalized advice or automated actions. For healthcare workers, these technologies allow for more comprehensive monitoring and free them to address the more complex aspects of their work. These technologies also make possible individualized care that promotes independence and safety of the care recipients.
The goal of this special issue is to provide readers an overview of the state of the art in robot-assisted home healthcare, identify and promote the future research direction sin this emerging field. By presenting the achievement and future opportunities in this multidisciplinary research area that crosscuts robotics, automation, AI and healthcare, this special issue will have great impact on the robotics and automation research community.
Click here for more information and important dates.
Call for Expressions of Interest for the role Junior Co-Chairs. The IEEE RAS TC on Model-Based Optimization for Robotics is seeking expressions of interest from those interested in becoming Junior Co-Chairs.
The role of the Junior Co-Chairs will be to assist with, and in some cases lead, the ongoing and future activities of the TC. Junior TC Co-Chairs will also be considered natural candidates to serve as Co-Chairs when the TC Co-Chairs rotate. Typically, Junior Co-Chairs will be early career researchers (e.g., senior PhD students or PostDocs), though we welcome all expressions of interest.
We are looking for keen and active researchers and practitioners from industry, government, or academia, especially those who actively participate in the RAS community (for example, attending conferences).
Expressions of interest outlining your motivation for becoming involved, together with a CV, should be submitted through the form https://forms.gle/8YaGtG6Vck8yMjGo8. If you have any questions about the role, please feel free to reach out to the Co-Chairs at tc.opt.rob@gmail.com.
Deadline- 1 October 2021
The IEEE Trans. on Automation Science and Engineering (T-ASE) is soliciting nominations for multiple Editors and Associate Editors, with a term beginning January 2021. Automation is in an unprecedented exciting and challenging era in view of machine learning, artificial intelligence, Industrial 4.0, and supply chain management during and after the COVID-19 pandemics. Editors and Associate Editors play important roles in ensuring the quality of publications and in guiding the general development of the Transactions, in multiple capacities including implementing reviews of manuscripts according to IEEE guidelines, soliciting emerging topical articles for special issues, guiding the overall direction of the publication, and providing feedback from the readership. Active participations are expected in the annual IEEE Conference on Automation Science and Engineering (IEEE CASE) and in at least one of the two editorial board meetings held annually in conjunction with the IEEE International Conference on Robotics & Automation (ICRA) and IEEE CASE. Furthermore, it is mandatory to participate in T-ASE Editorial Board Workshop (during IEEE CASE), if it is offered.
The term of an Editor or Associate Editor normally consists of a one-year probation period followed by four years (for Editor) or two years (for Associate Editor) of additional service if performance is satisfactory. Candidates should have a strong technical background in T-ASE related areas and excellent English language skills. Previous publications in T-ASE and participation in IEEE CASE are strongly preferred.
Nominations should include a resume (not to exceed three pages), a complete list of journal publications, previous experience with publications as a reviewer or in editorial capacities, and areas of technical expertise. Nominations of industrial, governmental and female candidates and candidates from Central and South America and Africa are especially encouraged. Please submit nominations in a single pdf file to Editorial Assistant Rebecca Hytowitz (r.hytowitz@ieee.org) by 15 October 2021.
The 39th IEEE International Conference on Robotics and Automation (ICRA) will take place at the Pennsylvania Convention Center in Philadelphia, USA on 23-27 May 2022. As the flagship conference of the IEEE Robotics and Automation Society, ICRA will bring together the world's top researchers and most important companies to share ideas and advances in our field. The conference will include plenary sessions, contributed paper sessions, workshops and tutorial sessions, forums, videos, exhibitions, and robot competitions.
As we celebrate the 60th anniversary of the first industrial robot, our discipline is advancing at tremendous pace while the socio-economic impact of our field continues to expand. Robotics and automation are increasingly taking the center stage in our lives and will play an important role in the future of work of our society, which is the theme of the conference. The ICRA 2022 conference will provide an ideal forum for sharing exciting scientific advances that will shape the future of work while also embracing economic and social considerations of our discipline.
We encourage submissions from the entire robotics community, even if you are unable to travel to ICRA 2022. The ICRA 2022 call for contributions can be found here: https://icra2022.org/contribute/call-for-papers

IMPORTANT DATES
- 9 September 2021: Submissions for RA-L papers with ICRA presentation option
- 14 September 2021: Submission of contributed papers
- 21 September 2021: Video submissions for ICRA contributed papers
- 21 September 2021: General video submissions (not related to a contributed paper)
- 24 September 2021: Submission of workshop & tutorial proposals
- 20 January 2022: Submission of competition proposals
CONTRIBUTED PAPERS
Papers to ICRA can be submitted through either of the following options:
1. Submission to ICRA (paper deadline 14 Sept 2021, accompanying video deadline 21 Sept 2021). The page limit is 6 pages for the paper (text, figures, tables, acknowledgement, etc.) + any number of pages for the bibliography/references. Papers exceeding the (6+n) page limit at the time of submission will be returned without review.
2. Submission to the IEEE Robotics and Automation Letters (RA-L) journal with the ICRA 2022 option (paper and accompanying video deadline 9 Sept 2021). Six pages in standard ICRA format are allowed for each paper, including figures and references, and a maximum of two additional pages can be purchased. Details are provided on the RA-L webpage and FAQ.
All papers must be submitted in PDF and must follow the ICRA double column format. Templates are available here: http://ras.papercept.net/conferences/support/support.php .
We strongly encourage authors to submit a video clip to complement the submission.
Detailed video submission guidelines for contributed ICRA papers and RA-L submissions:
* File size: up to 20MB
* Format (only one of the following should be used): mpeg, mp4, mpg
* Maximum duration: 180 sec.
* Minimum height: 480
* Minimum frame rate (fps): 20
* Scan type: Progressive
A video that was NOT submitted with the initial submission of an ICRA paper or RA-L paper with the ICRA option, will NOT be accepted at a later date.
CONTRIBUTED STAND-ALONE VIDEOS
The ICRA 2022 organizing committee encourages researchers and the general public to submit stand-alone videos that capture the present and the future of robotics. We are soliciting videos in three categories: state-of-the-art in robotics and automation technology or early adoption by consumers and impact on society, negative results/bloopers, and imagining the future. We welcome videos showing early results as well as well-researched results. The emphasis should be on real systems, or realistic models, and should be accessible to everyone, both in terms of content and in terms of presentation.
Videos submissions guidelines
To submit a video to ICRA 2022, please refer to the following instructions:
* Duration: 1-4 minutes.
* Size: up to 50 MB.
* Format (only one of the following should be used): mpeg, mp4, mpg
* Maximum duration: 240 sec
* Minimum video quality: 720p
* Minimum frame rate (fps): 24
* Codecs: Do not use special codecs in order to provide as much portability across platforms as possible. Any variance from the suggested formatting may result in difficulties playing the file on different platforms and could be blocked.
* If recorded footage is sped up in the video, the speedup factor should be clearly indicated.
* Audio is optional, but lack of audio should have minimal impact on the comprehension of the video.
* Structure: The video must include at the beginning a video cover with the title, authors and affiliation and the credits at the end.
The video should not have any commercial pitch and the authors of each video must have clear copyright of the audio and visual content. The copyright should be released to the conference.
The submission of the videos will be through the electronic submission process via PaperPlaza (https://ras.papercept.net), the deadline is 21 Sept 2021.
Each video submission must be accompanied by a one-page description in PDF file format, which includes:
1. title, authors, and affiliation
2. video category (regular video OR blooper)
3. 200-word abstract, and
4. contact information
The selected videos (and the PDF descriptions) will be linked in the program. Videos will be displayed during the conference and to the public via social media and IEEE TV.
PRESENTATION OF T-RO AND RAM PAPERS
Papers accepted to IEEE Transactions on Robotics (T-RO) or IEEE Robotics & Automation Magazine (RAM) may be invited to present at ICRA 2022. Eligible authors will be contacted by the EiC of T-RO/RAM. For more details, check the following policies.
T-RO policy: https://www.ieee-ras.org/publications/t-ro
RAM policy: https://www.ieee-ras.org/publications/ram/information-for-authors-ram/presenting-your-robotics-automation-magazine-paper-at-icra-or-iros
WORKSHOPS AND TUTORIALS
Tutorials and workshops will be held on 23 May and 27 May 2022, the day before and after the main conference.
Please submit your workshop or tutorial proposal as a PDF file by 24 Sept 2021. Use the Workshop option on the ICRA 2022 submission page. Additional information can be found here: https://icra2022.org/contribute/call-for-workshops-tutorials
COMPETITIONS
Competitions provide a unique venue for state-of-the-art technical demonstrations from research labs throughout academia and industry. Conference attendees and media representatives will have the opportunity to experience live demonstrations of robotic technology via these competitions (assuming pandemic constraints allow). Please submit your competition proposal by 20 Jan 2022. Additional information can be found here: https://icra2022.org/contribute/call-for-competitions
Each year, the IEEE Robotics and Automation Society offers financial support for Technical Education Programs (RAS-TEP), also known as "Seasonal Schools." In efforts to bring RAS closer to its membership, programs are held each year across the globe in person or virtually. RAS hopes to make the Technical Education Programs available to anyone, regardless of where you live.
The RAS-TEP program is jointly run by the RAS Member Activities Board (MAB) and the RAS Technical Activities Board (TAB). These Boards will review proposals and select the TEP programs each year. The program sponsors schools around the world, to be held in person, virtual or as a hybrid. Approved 2021 Technical Education Programs (Seasonal Schools) will receive the following funding, based on the type of school offered:
• up to USD$25,000.00 in funding from RAS for an in person or hybrid event
• up to USD$10,000.00 in funding from RAS for a fully virtual event
Funding should be used to reduce the event cost for RAS Student Members, to extend the schools reach and impact, and to assist in securing high quality instructors.
The review of summer school proposals is based on assessments from two different viewpoints, the first one with respect to the general structure, including organizational matters and budget, and the second one with respect to the technical content.
The Education Committee will check the general organizational structure of the summer school, including budget aspects and guide through the general application process.
Suited Technical Committees (TCs) of the RAS must endorse the proposal. Current TCs are listed at: www.ieee-ras.org/technical-committees.
Technical Education Program on-line proposal form
For complete details on proposing a RAS-TEP, visit the TEP Hosting Guidelines.
Deadlines for the submission of 2022 proposals
- Deadline: 15 September 2021
- Decision: October 2021
- Notification: November 2021
Congratulations to the following Authors for their outstanding achievement as recipients of RAS Publication Awards!
IEEE Transactions on Robotics King-Sun Fu Memorial Best Paper Award
Congratulations to the following winners of the 2021 King-Sun Fu Memorial Award. This award honors the best paper printed in the IEEE Transactions on Robotics in the previous year.
"TossingBot: Learning to Throw Arbitrary Objects With Residual Physics"
Andy Zeng, Shuran Song, Johnny Lee, Alberto Rodriguez and Thomas Funkhouser
IEEE Transactions on Robotics; vol. 36, no. 4, pp. 1307-1319, August 2020
IEEE Transactions on Automation Science and Engineering Best Paper Award
Congratulations to the following winners of the 2021 IEEE Transactions on Automation Science and Engineering Best Paper Award. This award honors the best paper printed in the IEEE Transactions on Automation Science and Engineering in the previous year.
“A Recursive Watermark Method for Hard Real-Time Industrial Control Systems Cyber Resilience Enhancement”
Zhen Song, Antun Skuric, and Kun Ji
IEEE Transactions on Automation Science and Engineering; vol. 17, no. 2, pp. 1030-1043, 2020
IEEE Transactions on Automation Science and Engineering Best New Application Paper Award
Congratulations to the following winners of the 2021 IEEE Transactions on Automation Science and Engineering Best New Application Paper Award. This award honors the best paper printed in the IEEE Transactions on Automation Science and Engineering in the previous year.
“Robotic Batch Somatic Cell Nuclear Transfer Based on Microfluidic Groove”
Yaowei Liu, Xuefeng Wang, Qili Zhao, Xin Zhao, and Mingzhu Sun
IEEE Transactions on Automation Science and Engineering; vol. 17, no. 4, pp. 2097-2106, 2020
IEEE Robotics and Automation Letters Best Paper Award
Five Recipients This Year!
Congratulations to the following winners of the 2021 IEEE Robotics and Automation Letters Best Paper Award. This award honors the best papers printed in the IEEE Robotics & Automation Letters in the previous year.
"LIT: Light-Field Inference of Transparency for Refractive Object Localization"
Zheming Zhou, Xiaotong Chen, and Odest Chadwicke Jenkins
IEEE Robotics and Automation Letters; vol. 5, no. 3, pp. 4548-4555, July 2020
"EGAD! An Evolved Grasping Analysis Dataset for Diversity and Reproducibility in Robotic Manipulation"
Douglas Morrison, Peter Corke, and Jürgen Leitner
IEEE Robotics and Automation Letters; vol. 5, no. 3, pp. 4368-4375, July 2020
"Inverted and Inclined Climbing Using Capillary Adhesion in a Quadrupedal Insect-Scale Robot"
Yufeng Chen, Neel Doshi, and Robert J. Wood
IEEE Robotics and Automation Letters; vol. 5, no. 3, pp. 4820-4827, July 2020
"Electronics-Free Logic Circuits for Localized Feedback Control of Multi-Actuator Soft Robots"
Ke Xu and Néstor O. Pérez-Arancibia
IEEE Robotics and Automation Letters; vol. 5, no. 3, pp. 3990-3997, July 2020
"Quadrupedal Locomotion on Uneven Terrain With Sensorized Feet"
Giorgio Valsecchi, Ruben Grandia, and Marco Hutter
IEEE Robotics and Automation Letters; vol. 5, no. 2, pp. 1548-1555, April 2020
IEEE Robotics and Automation Magazine Best Paper Award
Congratulations to the following winners of the 2021 IEEE Robotics and Automation Magazine Best Paper Award. This award honors the best paper printed in the IEEE Robotics & Automation Magazine in the previous year.
“Vine Robots: Design, Teleoperation, and Deployment for Navigation and Exploration”
Margaret M. Coad, Laura H. Blumenschein, Sadie Cutler, Javier A. Reyna Zepeda, Nicholas D. Naclerio, Haitham El-Hussieny, Usman Mehmood, Jee-Hwan Ryu, Elliot W. Hawkes, and Allison M. Okamura
IEEE Robotics and Automation Magazine; vol. 27, no. 3, pp. 120-132, September 2020
IEEE Transactions on Haptics Best Paper Award
Congratulations to the following winners of the 2021 IEEE Transactions on Haptics Best Paper Award. This award honors the best paper printed in the IEEE Transactions on Haptics in the previous year.
"Proprioceptive Localization of the Fingers: Coarse, Biased, and Context-Sensitive"
Bharat Dandu, Irene A. Kuling, and Yon Visell
IEEE Transactions on Haptics, vol. 13, no. 2, pp. 259-269, 1 April-June 2020
IEEE Transactions on Haptics Best Application Paper Award
Congratulations to the following winners of the 2021 IEEE Transactions on Haptics Best Application Paper Award. This award honors the best paper printed in the IEEE Transactions on Haptics in the previous year.
"Soft Exoskeleton Glove with Human Anatomical Architecture: Production of Dexterous Finger Movements and Skillful Piano Performance"
Nobuhiro Takahashi, Shinichi Furuya, and Hideki Koike
IEEE Transactions on Haptics, vol. 13, no. 4, pp. 679-690, Oct.-Dec. 2020
The RAS Member Activities Board (MAB) awards a limited number of Chapter Initiative Grants to local RAS Chapters for professional development, educational outreach, and other programs. Grant proposals will be reviewed by the MAB at its meeting in late September 2021 and funds up to US $2,000 will be awarded on a competitive basis. The deadline for proposals is 15 August 2021. For submission details, please visit: https://www.ieee-ras.org/chapters/support-for-chapters
IEEE Robotics & Automation Magazine is soliciting nominations for four new associate editors, to begin in January 2022. The associate editors play an important role in maintaining the caliber of the magazine by ensuring the quality of published articles by implementing reviews of technical features according to IEEE guidelines, soliciting interesting and topical material articles for publication in the magazine, guiding the overall direction of the publication and providing feedback from the readership through e-mail conversations, teleconferences, and twice-yearly in-person meetings held in conjunction with IEEE Conference on Robotics and Automation (ICRA) and the IEEE International Conference on Intelligent Robots and Systems (IROS).
Associate editor terms normally consist of a one-year probation period followed by two years of additional service if performance is satisfactory. Applicants should have a strong technical background and excellent English language skills.
Nominations should include a resume (not to exceed three pages), previous experience with publications as a reviewer or in other capacities, and areas of technical expertise. Please submit nominations via the online form: https://app.smartsheet.com/b/form/f590ed5d4e7d483791394ecfb7db2221
Nominations Due: 1 September 2021
The United Nations expects Africa's population to be more than double and the global population to increase by an additional two billion people by 2050. This expectation means there will be an increased demand for food and agricultural products in the future. In order to meet increased demand despite challenges such as climate change, a limited supply of new arable land and difficulties in sourcing skilled farm labour, global agricultural systems today require a transformation in which mechatronic technologies will play an important role. These emerging technologies driven by the Fourth Industrial Revolution are disrupting many industries, bringing rapid and largescale change, including digital building blocks such as big data, the internet of things (IoT), artificial intelligence and machine learning and blockchain, new physical systems, and advances in science. Therefore, Mechatronics for The Era of Digital Agriculture is attracting more and more attention in the community of mechatronics research, as the scientific interest and the technological boost.
The main aims of this focused section in IEEE/ ASME Transactions on Mechatronics (TMECH) are to document the current state of the art in Mechatronics for The Era of Digital Agriculture and to present new results in several emerging research areas. Submissions can address theoretical aspects in these areas, but approaches or technologies that consider aspects such as market needs, innovation management, and the requirements for industry-level diffusion or deployment are encouraged. The topics of interest within the scope of this focused section include but are not limited to:
- Low-cost robots using low-cost sensors for day/night operations in intensive agriculture
- Advanced autonomy for unmanned mechatronics systems
- Deep-learning-based approaches for high-throughput phenotyping and remote sensing
- Development of cooperative mechatronics systems for digital agriculture
- Cybersecurity for agricultural mechatronic systems
- Soft-grasping/soft-robotics for agri-food manipulators
- Sensing technologies for situation awareness in agricultural applications
Manuscript Preparation
Papers must contain original contributions and be prepared in accordance with TMECH standards. Instructions for authors are available online at: http://www.ieee-asme-mechatronics.org
Manuscript Submission
Manuscripts should be submitted through the online submission service available at: http://mc.manuscriptcentral.com/tmech-ieee. All manuscripts must be prepared according to the IEEE/ASME TMECH publication guidelines and will be reviewed following the standard IEEE/ASME TMECH review process.
Important Dates
Paper Submission- 1 September 2021
Completion of First Review- 1 December 2021
Submission of Revised Papers- 15 January 2022
Completion of Final Review- 15 March 2022
Submission of Final Manuscripts and Copyright Forms- 30 April 2022
Publication June 2022
Guest Editors
Erkan Kayacan, School of Mechanical & Mining Engineering, University of Queensland, Australia, Email: e.kayacan@uq.edu.au
Volkan Isler, Department of Computer Science and Engineering, University of Minnesota, USA, Email: isler@umn.edu
Eldert Van Henten, Department of Plant Sciences, Wageningen University, Netherlands, Email: eldert.vanhenten@wur.nl
Girish Chowdhary, Department of Agricultural and Biological Engineering, University of Illinois at Urbana Champaign, USA, Email: girishc@illinois.edu

|
|
||
|
||
|
The Robotics & Automation Society Student Activities Committee (RAS SAC) is proud to present “Transition to a Career in Industry”, a panel with robotics thought leaders: Aleksandra Faust (Google Brain), Matei Ciocarlie (Willow Garage), and Torsten Kroeger (X, The Moonshot Factory). This panel is intended for robotics students and engineers interested in learning more about careers in industry after earning their degree. The panel will be moderated by RAS SAC Co-Chair, Blake Hament.
T-ASE Special Issue on Automation Analytics beyond Industry 4.0- Call For Papers extended to 31 July 2021
Special Issue on Automation Analytics beyond Industry 4.0: From Hybrid Strategy to Zero-Defect Manufacturing
Most of traditional industries or emerging countries may not be capable of directly transiting to Industry 4.0. To fill the gap between as-is Industry 3.0 and to-be Industry 4.0, some disruptive innovations from automation and industrial engineering identify best practice with adopting the cost-effective semi-automated system to manage the potentially socio-economic impacts of infrastructure disruptions, while taking into account total resource management for sustainability. This is the so-called “Hybrid Strategy (HS)”, or “Industry 3.5”. On the other hand, the current Industry 4.0 related technologies should also emphasize on quality enhancement to achieve “Zero-Defect Manufacturing (ZDM)”, i.e., referred to as “Industry 4.1”. ZDM is a systematic strategy to realize the goal of Zero Defects, which includes two phases. Phase I: accomplish Zero Defects of all the deliverables by applying efficient and economical total-quality-inspection techniques; and Phase II: further ensure Zero Defects of all the products gradually by improving the yield with big data analytics and continuous improvement. Both of the challenges and opportunities from HS to ZDM have significantly expanded the scopes of traditional automation science and engineering.
The Virtual School on SLAM in Deformable Environments is a new winter school hosted by the Robotics Institute (Centre for Autonomous Systems) and sponsored by the IEEE Robotics & Automation Society, over five days from 5 to 9 July 2021 (during the southern hemisphere winter). The UTS Robotics Institute is one of the world leaders in SLAM research. The School aims to promote research of robot localisation, mapping and navigation in deformable environments.
SLAM requires a robot to be able to build a map of the environment in real-time and simultaneously estimate its own location within the map. In the last two decades, significant progress has been made in the research for SLAM in static environments. However, when the environment has deformations such as when a surgical robot is navigating in internal body environments, SLAM needs to build a time-varying 3D map of the soft tissues and estimate the location of the sensor within the map. This poses a very challenging problem since the sensor is moving whilst the environment is deforming.
This winter school serves as a platform for research students and postdoc researchers to understand the important research problems in this research area, learn to the state-of-the-art techniques used in SLAM in deformable environments, and practice the basic algorithms through tutorials and projects.
![]()
PRELIMINARY PROGRAM
- Keynote speeches from distinguished researchers.
- Lectures and tutorials on SLAM, visual SLAM, and SLAM in deformable environments.
- Computer-based practical activities and group projects, where students may use their own laptops or workstations to work together, processing the data and developing the algorithms.
- Virtual visits to UTS Robotics Institute and the other groups.
- Social networking and teaser/poster presentation from students
- Panel discussion on future research directions
REGISTER FOR THE SLAM WINTER SCHOOL
Non-IEEE RAS member – $50 aud
IEEE RAS member – FREE
REGISTER HERE
MORE INFORMATION
Please visit the following website for a detailed Daily Schedule, Keynote Speakers and Instructors:
https://www.uts.edu.au/research-and-teaching/our-research/centre-autonomous-systems/events/2021-winter-school-slam-deformable-environments
IEEE Robotics and Automation Society (RAS) is excited to announce our collaboration with IEEE Entrepreneurship to present Entrepreneurship and Innovation in Robotics.
In this session, presenters will discuss the factors that cause startups / products to fail in the robotics space with a specific focus on technical challenges, best practices, and possibilities for improvement. We will hear case studies into the various phases of innovation and product development and learn about the circumstances that contribute to the high and lows of entrepreneurship in the robotics industry.
Some questions / points to explore:
- What is your product / solution / service offering?
- What is the biggest challenge for a robotics startup at the moment?
- Do you have a market entry / customer base?
- What are some of the product evolution lessons you have learned?
- What is the biggest challenge you face?
- Looking back over the 4 – 5 years in your roles, what would you have done differently?
- What is one piece of practical advice you would give to someone starting?
- Has the IEEE (standards, technical society, conferences, etc.) played a role in your product innovation?
- Who do you talk to when you need advice?
- Without naming names, what was the worst piece of advice that you got from someone who you were sure knew what they were talking about?
- Tell us about the first time you ran a pilot with a customer. What were you over-prepared for, and what were you underprepared for?
- What technologies do you think have the most potential for new robotics companies right now?


