
Study Group on Grasp Performance Standards
There has been an increase in the development of end-effector technologies for grasping. Inspired by nature, these end-effectors hold potential for allowing robots to pick up and manipulate a broader range of objects, without requiring customized end-of-arm tooling or grippers. With this rapidly growing number of grasping type end effector designs, there is a need to capture their individual competencies and characteristics under a unified framework. In addition to knowledge of basic end effector characteristics such as the number of fingers, degrees of freedom, and degrees of actuation, performance metrics can provide valuable insight into not only the raw traits of the technology, but also their task and function-level performance capabilities. These measures can then be used to help match capabilities to end-user needs as well as provide researchers and developers insight for improving their hardware and software designs.
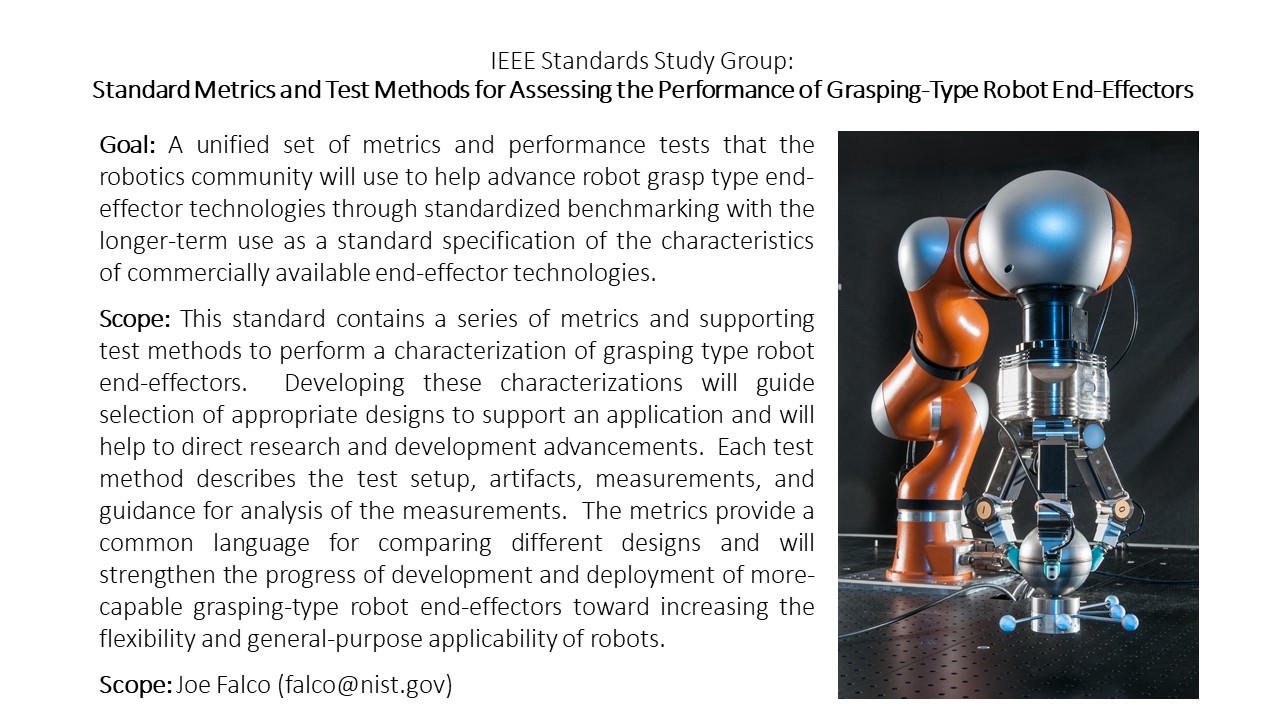
This standard contains a series of metrics and supporting test methods to perform a characterization of grasping type robot end-effectors. Developing these characterizations will guide selection of appropriate designs to support an application and will help to direct research and development advancements. Each test method describes the test setup, artifacts, measurements, and guidance for analysis of the measurements. The metrics provide a common language for comparing different designs and will strengthen the progress of development and deployment of more-capable grasping-type robot end-effectors toward increasing the flexibility and general-purpose applicability of robots.
Industry and Government (IAB) News
Easy Links
RAS is a volunteer driven society with over 13,000 members worldwide.

Students are future of robotics and automation.

IEEE International Conference on Automation Science and Engineering
IEEE/RSJ International Conference on Intelligent Robots and Systems
IEEE International conference on Robotics and Automation
