Scope
The Space Robotics Technical Committee has two main areas of interest: Microgravity and Planetary Robotics. Microgravity Robotics includes manipulation and mobility for scenarios such as International Space Station (ISS) operations and satellite servicing. Planetary Robot systems address scenarios such as Mars and lunar exploration using manipulation or mobility on or near the surface. Some scenarios, such as asteroid and comet exploration, have environments with low gravity which may blur the distinctions between these categories.

The Dextre robot on the International Space Station
For Microgravity Robotics the space environment (radiation, contamination sensitivity, thermal extremes, etc.) poses unique challenges to robot and robot algorithms. Despite this, it is expected that the robotics discipline will find increasing importance in coming years, particularly as the opportunities for human-robot and robot-robot cooperation arise in space exploration. Priority areas for this technical committee include:
- Electromechanical design and control.
- Microgravity locomotion.
- Machine vision for inspection and assembly, including compensation for stark lighting, glare, glint, and deep shadows.
- Command and control interfaces, including teleoperated modes.
- Power sources and consumable recharging techniques.
- Radiation hardening and effects on processing throughput.
- Thermal considerations in space robot design.
Below is a list of historical and upcoming missions that define the state of the practice in orbital robotics:
- DLR ROTEX (1993) – 6 DOF autonomous manipulation experiment on ISS
- JAXA ETS-VII (1997-1999) – first satellite to be equipped with a robotic arm.
- CSA Canadarm 2 (2001) – service crane for the ISS assembly and maintenance.
- DLR ROKVISS (2005-2010) – a 2 DOF manipulation hardware test bed outside ISS
- MIT SPHERES (2006-present) – internal microsatellite testbeds aboard ISS.
- JAXA JEM-RMS (2009) – service arm on ISS.
- DARPA Orbital Express (2007) – autonomous satellite grappling.
- CSA Dextre (2008-present) – dual-armed external support system on ISS
- NASA JSC Robonaut 2 (2010-present) – dual-armed experimental system internal to ISS
- NASA GSFC Robotic Refueling Mission (2013) – ISS manipulation experiments.
- NASA Raven (2016) – ISS autonomous navigation and guidance system technology demonstrator.
- NASA Restore-L (2020) –satellite refueling mission.
- DARPA Phoenix Mission (2020) – multiple satellite repairs.
Additionally, it is valuable to mention these important research systems for orbital robotics:
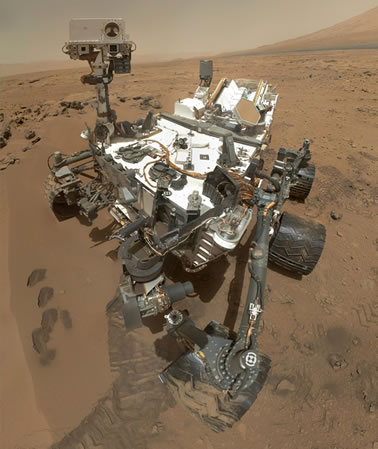
The Mars Science Laboratory Rover, “Curiosity”.
For Planetary Robotics, the surface environment also poses unique challenges. These include Microgravity Robotics’ issues during cruise phase, or if an atmosphere is not present. Further, there is usually the greater uncertainty of interacting with an unexplored natural terrain instead of man-made structures. Planetary Robotics technical topics include:
- Sensing and perception for planetary exploration, including terrain-relative precision position estimation.
- Above-surface, surface, and sub-surface planetary mobility, possibly from novel vehicle design concepts.
- Command and control with limited bandwidth, often precluding teleoperation and requiring autonomous surface operations, with natural terrain navigation and manipulation.
- Planetary rovers systems engineering.
- Testing and qualification, including field tests on Earth and Mars.
- Human-Robot system design and development.
News
Recent news on space robotics is available from IEEE Spectrum News on Space Robotics.