
Latest News
Don't delay! Nominations are due 15 January 2021 for the 2022 IEEE Technical Field Award in Robotics and Automation (TFA). This is the most prestigious award presented by IEEE in the field of robotics and automation, and includes a medal and a $10,000 usd honorarium. IEEE TFAs are awarded for contributions or leadership in a specific field of interest of the IEEE and are among the highest awards presented on behalf of the IEEE Board of Directors.

Visit https://www.ieee-ras.org/awards-recognition/ieee-awards/69-awards-recognition/society-awards/90-ieee-fellow for a description of the award criteria and instructions on submitting a nomination.
The 2021 IEEE Technical Field Award in Robotics and Automation will be presented to Tomas Lozano-Perez and Jean-Claude Latombe,
"For foundational contributions to robot motion planning and visionary leadership of the field."
The presentation will take place at the Awards Ceremony held during during the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) in Prague, Czech Republic on 27 September-1 October 2021.
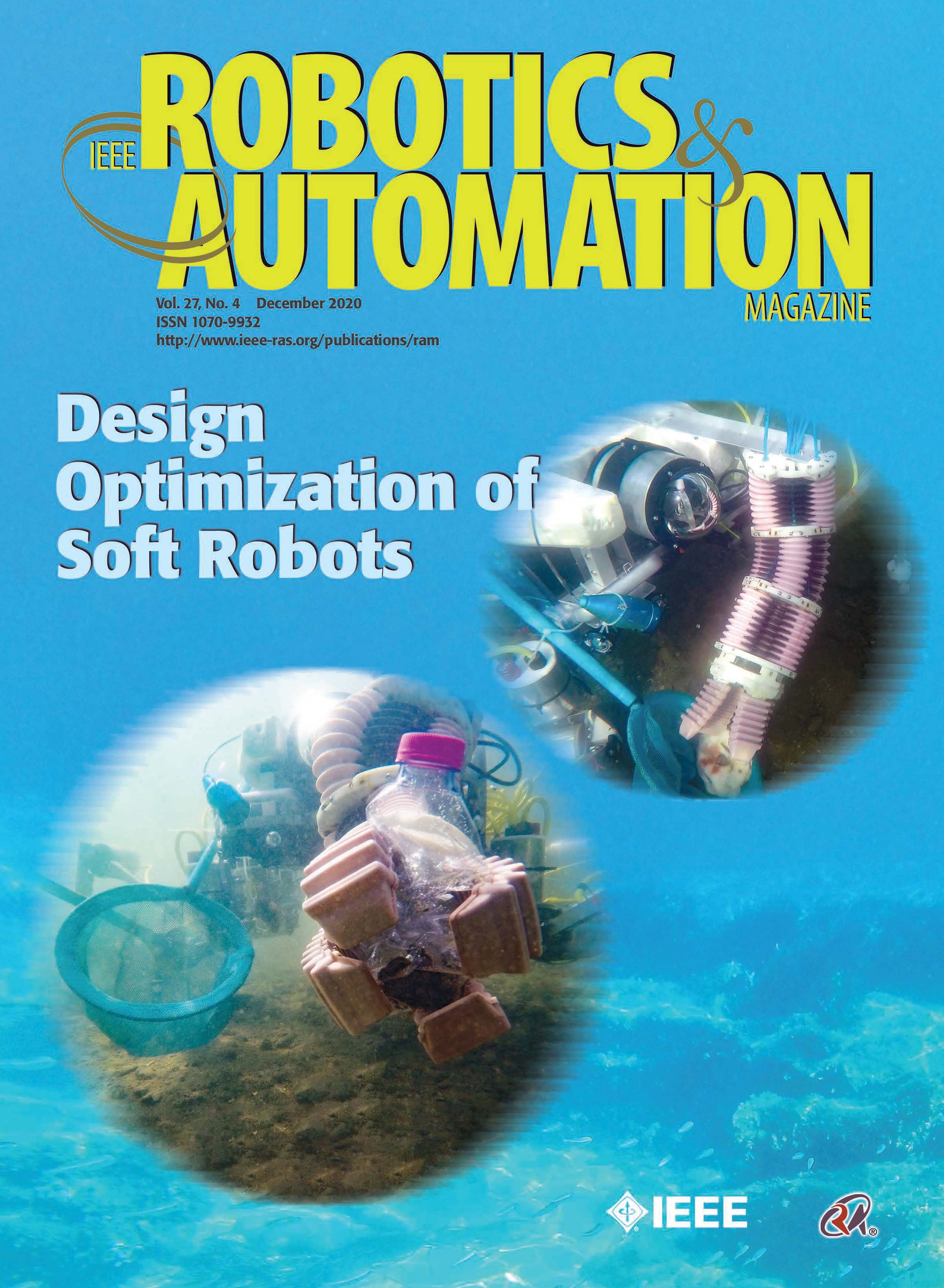
We are pleased to offer you the December 2020 issue of the IEEE Robotics and Automation Magazine!
Act NOW! The deadline to cast your vote as an RAS Member is Tuesday, 15 December!

RAS members are voting to elect new RAS Administrative Committee members to serve 3-year terms beginning 1 January 2021. All RAS members (Graduate Student Members and above) have received voting instructions, the biographies, and statements of the candidates by email. RAS membership must be active as of 15 November 2020 to be eligible to vote. Members who do not have valid emails registered with the IEEE or have opted not to receive e-mail from IEEE, have received their election materials by post.
Use https://eballot4.votenet.com/IEEE to access the ballot and cast your vote now. If you do not remember your password, you may retrieve it on the voter login page. Voting must be completed no later than 15 December 2020. Any returns received after this date will not be counted. The online voting site will close at 4:00 pm Eastern Time.
Candidate bios and position statements are here: https://www.ieee-ras.org/about-ras/governance/election-candidates
If you have any questions about the IEEE Robotics and Automation Society voting process, please contact ieee-rasvote@ieee.org or +1 732-562-3904.
Heartfelt congratulations to Tomas Lozano-Perez and Jean-Claude Latombe, selected recipients of the prestigious 2021 IEEE Robotics and Automation Technical Field Award for "For foundational contributions to robot motion planning and visionary leadership of the field." They will receive this award during the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) in Prague, Czech Republic on 27 September-1 October 2021.
The groundbreaking contributions of Tomas Lozano-Perez and Jean-Claude Latombe to tackling the challenge of robot motion planning has provided robots with the ability to avoid colliding with obstacles while they navigate real-world environments. Lozano-Perez introduced the configuration space formalization, which unified geometry, mechanics, and computation in a single general framework to address motion planning for robots with any number of degrees of freedom and shape. Lozano-Perez’s work provided the foundation for motion planning and inspired Latombe’s classic textbook Robot Motion Planning (Springer, 1991). Latombe co-developed the randomized potential field (RFP) planner with Jerôme Barraquand to handle robots with higher degrees of freedom. RFP was the precursor to his probabilistic roadmap planner (PRM) algorithm, co-developed with Lydia Kavraki, an example of sample-based motion planning. Latombe’s work on PRM is considered to have sparked a new era in motion planning.
IEEE Senior Member is a high grade of IEEE membership. Any IEEE member can apply for the Senior Member grade. You MUST be an IEEE Senior Member to be nominated for the highest grade of IEEE membership, IEEE Fellow.
Requirements to become an IEEE Senior Member are not very high. Submit a Senior Member application form today! Applications are reviewed and approved on a rolling basis several times per year.
To be eligible for application or nomination, candidates must:
- Be engineers, scientists, educators, technical executives, or originators in IEEE-designated fields
- Have experience reflecting professional maturity
- Have been in professional practice for at least ten years (with some credit for certain degrees)
- Show significant performance over a period of at least five of their years in professional practice
For additional details on applying for Senior Member or to review the added benefits, please refer to the IEEE Senior Member webpage.
https://www.ieee.org/membership/senior/
2021 RAS Fellows Evaluated by RAS
Gianluca Antonelli – University of Cassino and Southern Lazio, Italy
“For contributions to modeling and control of underwater robots”
Timothy Barfoot – University of Toronto, Canada
“For contributions to mobile robot navigation”
Shuxiang Guo – Kagawa University, Japan
“For contributions to medical robots for minimally invasive surgery and biomimetic underwater robots”
Ayanna Howard – Georgia Institute of Technology, USA
“For contributions to human-robot interaction systems”
Hadas Kress-gazit – Cornell University, USA
“For contributions to automated control synthesis and formal methods for robotics”
Jose Neira – Universidad de Zaragoza, Spain
“For contributions to simultaneous localization and mapping (SLAM) for robot navigation”
Claude Samson – INRIA, France
“For contributions to mobile and underactuated mechanical systems control”
Jacquelien Scherpen – University of Groningen, The Netherlands
“For contributions to nonlinear model reduction and passivity-based control”
Danwei Wang – Nanyang Technological University, Singapore
“For contributions to modelling, analysis, and control for constrained robots”
Junzhi Yu – Peking University, China
“For contributions to bio-inspired swimming robots”
New York Times article, "Can We Make Our Robots Less Biased Than We Are?" mentions RAS members, Ayanna Howard and Odest Chadwicke Jenkins, and their commitment to ending the injustices in how their technology is often made and used.

Ayanna Howard is currently serving as Editor in Chief of the RAS ICRA Conference Editorial Board, Member of RAS Conference Activities Board, and member of the RAS Women in Engineering Committee. Howard is Professor and Chair of the School of Interactive Computing at Georgia Tech, and Founder & CTO at Zyrobotics.

Odest Chadwicke Jenkins is currently serving as a Co-Chair of RAS CARES Committee and an associate director of the Michigan Robotics Institute at the University of Michigan. Jenkins' research interests include Mobile manipulation, computer vision, interactive robot systems, and human-robot interaction.
To read the full article click here.
Women in Robotics Panel
 Carlotta Barry
Rose-Hulman Institute
of Technology, USA |
Katie Driggs-Campbell
University of Illinois
Urbana-Champaign, USA |
Cecilia Laschi
National University of Singapore
Singapore |
|
Iolanda Leite
KTH Royal Institute
of Technology, SWEDEN |
Shawna Thomas
Moderator
Texas A&M University,USA
|
Karinne Ramirez-Amaro
Chalmers University of
Technology, Sweden |





RAS Standards Meeting will be held virtually on 27 October 2020 9:00am-11:00pm EDT
The IEEE Standards Association under the IEEE Robotics and Automation Society (RAS) is reviewing the proposal to establish a Study Group, Semantic Map for Autonomous Robots (SMART), to investigate the feasibility of creating standard for common representation of semantic map data for robots and validation under common parameters, with the goal of enabling robots to be more intelligent, and be able to plan and execute high level robotic tasks within real-world environments.
The SMART Study Group will investigate the potential for standardizing semantic map data model, data representation and data formats to express the relation among the data model entities. The data model expresses cognitive information about the environment of various types of robots equipped with artificial intelligence in the form of a global map containing local maps and transformation through the absolute and relative coordinate system. The standard data format permits the exchange of information among the mobile robots in a standardized method. Moreover, the standard contributes to promote development of experimental methodologies for mobile robotics as a valuable tool for facilitating comparison, benchmarking, and evaluation of semantic maps obtained from different systems.
The expected benefits of the established standard for semantic map data representation will facilitate various robotics applications such as autonomous robot navigation, factory logistic systems, industrial and agricultural robots, defense and rescue robots, and service robots for domestic application.

Motivation
The advent of robot-assisted surgery has consistently improved the outcome of surgical procedures by providing more effective and precise medical interventions. Hence, in recent years, autonomous systems in robotic surgery have attracted growing research interests in an enormous scope of applications. Concurrently to the growing needs and requests of sophisticated mechanisms that can help, enhance the medical procedure and in some extent replace the medical practitioners, concerns related to the safety of completely autonomous surgical robotic systems have emerged during the years. Hence, how to integrate advanced designs, modeling, perception, learning, control, and cognition, which involve the highest levels of the imaginative ability to bring the multi-information together and create novel solutions, is an effective way to enhance the level of autonomy of intelligent surgical robotic system and it is becoming an inspiring and promising subject which aim at improving the performance of
robotics surgery. However, there are still many challenges and problems related to safety of autonomous robotic surgical systems and their integration with the medical team which can be tackled only by developing more advanced robotic solutions.
”Bridging the Gap Between Soft Robots and Soft Materials: Discovering New Material Functionalities vs. Creating Architected Compliance”

The Deadline to vote is 12 November 2020!
RAS members are voting to elect new RAS Administrative Committee members to serve 3-year terms beginning 1 January 2021. All RAS members (Graduate Student Members and above) have received voting instructions, the biographies, and statements of the candidates by email. RAS membership must be active as of 15 August 2020 to be eligible to vote. Members who do not have valid emails registered with the IEEE or have opted not to receive e-mail from IEEE, have received their election materials by post.
Use https://eballot4.votenet.com/IEEE to access the ballot and cast your vote now. If you do not remember your password, you may retrieve it on the voter login page. Voting must be completed no later than 12 November 2020. Any returns received after this date will not be counted. The online voting site will close at 4:00 pm Eastern Time.
Candidate bios and position statements are here: https://www.ieee-ras.org/about-ras/governance/election-candidates
If you have any questions about the IEEE Robotics and Automation Society voting process, please contact ieee-rasvote@ieee.org or +1 732-562-3904.
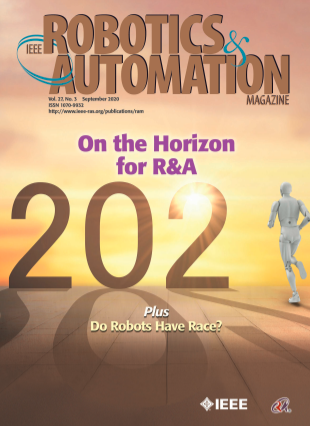
We are pleased to offer you the September 2020 issue of the IEEE Robotics and Automation Magazine!
| Miniaturized Robotics: The Smallest Camera Operator Bot Pays Tribute to David Bowie | Olivier Lehmann, Jean-Yves Rauch, Youen Vitry, Tibo Pinsard, Pierre Lambert, Michael Gauthier |
| Collaborative Surgical Robots: Optical Tracking During Endovascular Operations | Christoff M. Heunis, Beatriz Farola Barata, Guilherme Phillips Furtado, Sarthak Misra |
| Sewing up the Wounds: A Robotic Suturing System for Flexible Endoscopy | Lin Cao, Xiaoguo Li , Phuoc Thien Phan, Anthony Meng Huat Tiong, Hung Leng Kaan, Jiajun Liu, Wenjie Lai , Yanpei Huang, Huu Minh Le, Muneaki Miyasaka, Khek Yu Ho, Philip Wai Yan Chiu, Soo Jay Phee |
| Toward Autonomous Driving by Musculoskeletal Humanoids: A Study of Developed Hardware and Learning-Based Software | Kento Kawaharazuka, Kei Tsuzuki , Yuya Koga, Yusuke Omura, Tasuku Makabe, Koki Shinjo, Moritaka Onitsuka, Yuya Nagamatsu, Yuki Asano, Kei Okada, Koji Kawasakii, Masayuki Inaba |
| Unmanned Aerial Vehicle-Based Hazardous Materials Response: Information-Theoretic Hazardous Source Search and Reconstruction | Michael Hutchinson, Cunjia Liu, Paul Thomas, Wen-Hua Chen |
| Vine Robots: Design, Teleoperation, and Deployment for Navigation and Exploration | Margaret M. Coad, Laura H. Blumenschein, Sadie Cutler, Javier A. Reyna Zepeda, Nicholas D. Naclerio, Haitham El-Hussieny, Usman Mehmood, Jee-Hwan Ryu, Elliot W. Hawkes, Allison M. Okamura |

With much sadness, we report that our friend Alberto Elfes peacefully rested on 5 July 2020 at age 67. The robotics community bid farewell to one of its pioneers, an outstanding researcher who, in the mid-eighties, invented the occupancy grid mapping, the embryo of the probabilistic techniques in robotics.

Born from german parents, in Maceio, State of Alagoas, Brazil, from an early age Alberto was interested in science and technology. In his late teens, he passed the admission entry exam to the Aeronautics Institute of Technology (ITA), Brazil. There he graduated in Electronic Engineering in 1975, obtained his master's degree in computer science in 1980, and was immediately hired as faculty. Alberto joined the Carnegie Mellon University in 1982 to pursue a Ph.D. in the emerging field of robotics. His dissertation entitled "Occupancy Grids: A Probabilistic Framework for Robot Perception and Navigation" marks a milestone in mobile robotics research.
After leaving Carnegie Mellon, Alberto held positions as Principal Research Scientist at the T.J. Watson Research Center (1989-1993), where he created the Mobile Robotics Laboratory. He returned to Brazil as project coordinator for the United Nations Development Program (UNDP) (1994-1997), where he acted as the director of the Automation Institute of Center for Information Technology (CTI) in Campinas, São Paulo (1994-1999). Among several advancements, Alberto conceived the Aurora Project, an autonomous airship for long term aerial monitoring and exploration (which was further advanced in this work at JPL). He then moved to Ulm/Germany as Mercator Professor (2000), and after one year, he accepted a position as Principal Scientist at Jet Propulsion Laboratory (2001-2011). In the last part of his career, he became the Chief Research Scientist in the Autonomous Systems Laboratory (ASL) at CSIRO in Brisbane, Australia, where he retired in May 2020.
Alberto was not only an all-embracing and curious mind, a cosmopolite, and a passionate robotics researcher but a caring teacher, mentor, and above all, a human being whose kindness touched each one who had the privilege to spend even a minute with him. Alberto Elfes was a loving husband to Noemia Elfes, an adored father to Cristiane and Albert, and an affectionate grandfather to Gabriel. He leaves a massive void in this presently unoccupied square of the grid, especially in our hearts, which only time can fill.
Mario F. Montenegro Campos, Universidade Federal de Minas Gerais, Belo Horizonte, Brazil
Erwin Prassler, Bonn-Rhein-Sieg University of Applied Sciences, Sankt Augustin, Germany
IEEE TRANSACTIONS ON AUTOMATION SCIENCE AND ENGINEERING
Special Issue on Challenges and Responses of Automation Science and Engineering to the COVID-19 Pandemic
The recent COVID-19 pandemic outbreak has posed a significant threat to health, life, economy, and the whole society, but also led to numerous challenges and opportunities to automation science and engineering research. Accurate and efficient testing and tracing of infective patients, rapid response of medical workforce, quick reconfiguration of manufacturing system for protective equipment, secured supply chain of medical resources, reliable tele-health and online services, safe reopening of business operations, and future fast production of vaccines, etc., are essential to help reduce system risk, prevent further infections, stabilize economy, and restore social life. Advanced automation science and engineering technologies, such as AI, data analytics, optimization, robotics, additive and digital manufacturing, 5G network, are critical to ensure effective responses. Such challenges and opportunities have significantly expanded the scopes of traditional automation science and engineering.

Deadline Date- 15 September 2020
IEEE HAC/SIGHT are soliciting IEEE member proposals for humanitarian and sustainable development projects that utilize technology to fight against COVID-19 in the areas of immediate impact, poverty mitigation, and inequality reduction.
Earlier this year, HAC/SIGHT funded over 70 grassroots member projects from 25 countries and 5 IEEE Regions in response to COVID-19. Given the tremendous response, another call for proposals has started. This time, the project scope areas are expanded to reflect the fact that the pandemic has not only affected health, but also exacerbated poverty and laid bare systemic inequality throughout the world.
Proposals may be submitted between now and 15 September 2020. More information may be found here!
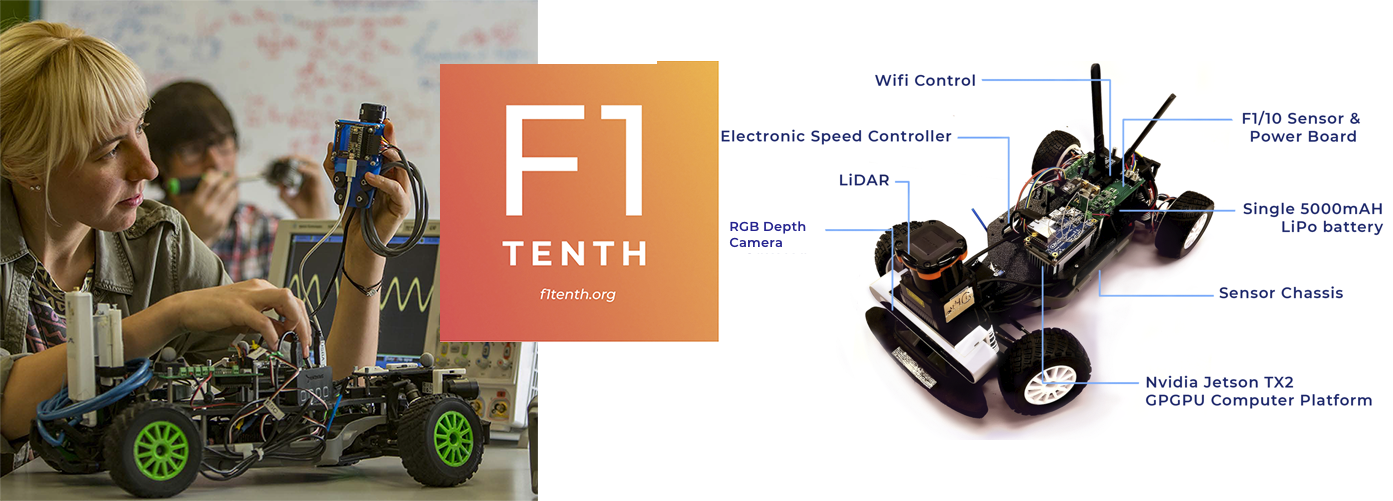
F1TENTH is an international community of researchers, engineers, and autonomous systems enthusiasts working with 1/10th scale autonomous racecars. We are excited to announce the 8th F1TENTH Autonomous Grand Prix/IROS 2020 F1TENTH autonomous racing competition! The IROS2020 timeline and more information is available on the race page.
Teams must develop robust perception, planning, and control algorithms that can deal with the uncertainties of a new track and new competitors. Just like a real Grand Prix, teams first qualify in a timed trial against each other to determine seeding and then compete head-to-head in an intense battle of algorithms. Highlights from the recent (July 2020) virtual IFAC competition can be viewed here.
We will be kicking off the 8th F1TENTH Autonomous Grand Prix with a webinar on September 2 at 13:00 EDT. We will go over race logistics and how to get started with the race simulator. The meet link is here.
Information on how to get started can be found in the Guidelines document.
Stay updated with us on slack in the #iros2020 channel.
Easy Links
Students are future of robotics and automation.

IEEE International Conference on Automation Science and Engineering
IEEE/RSJ International Conference on Intelligent Robots and Systems
Special 40th anniversary celebration of RAS and ICRA

