
Latest News
Congratulations to the IEEE Robotics and Automation Society members recently elevated to Senior Member status by the IEEE Admission and Advancement (A&A) Senior Member Review Panel.
To be eligible for application or nomination, candidates must:
- be an engineer, scientist, educator, technical executive or originator in IEEE-designated fields;
- have been in professional practice for at least ten years;
- have shown significant performance over a period of at least five of those years.
In addition, candidates for Senior Member grade must supply three references from current IEEE members holding the grade of Fellow, Senior Member, or Honary Member.
For more information, visit https://www.ieee.org/membership/senior/ or Email senior-member@ieee.org.
|
Mehmet Adalier Sacramento Valley Section Antara Teknik |
Vincenzo Calabro Italy Section Cybertronics & Norwegian Subsea |
MD ALI Reg 8-Countries Outside Sections Nazarbayev University |
|
Chan-Jin Chung Southeastern Michigan Section Lawrence Technological University |
Vijendra Babu D Madras Section Aarupadai Veedu Institute of Technology |
Christopher Clark Foothill Section Harvey Mudd College |
|
Erik Beall Twin Cities Section Digilabs & Hema Imaging |
Filip Cuckov Boston Section University of Massachusetts Boston |
Stephan Biller Eastern North Carolina Section IBM |
|
Wangli He Shanghai Section East China University of Science and Technology |
Elias Bortokan Puerto Rico & Caribbean Section Bortokán Institute |
Juan David Hernandez-Vega Houston Section Rice University |
|
Andreas Kugi Austria Section Vienna University of Technology |
Gopalakrishna Kuppa Bangalore Section |
Muyinatu Lediju Bell Baltimore Section Johns Hopkins University |
|
Yen-Chen Liu Tainan Section National Cheng Kung University |
Carlo Menon Vancouver Section Simon Fraser University |
Stefan Mocanu Romania Section Polytechnic University of Bucharest |
|
Kevin Moerman United Kingdom and Ireland Section National University of Ireland Galway |
Fabio Morbidi France Section Université de Picardie Jules Verne |
Jay Morreale North Jersey Section p-brane LLC |
|
Alessandro Papadopoulos Sweden Section Mälardalen University |
Kyle Reed Columbus Section University of South Florida |
Nikolaos Vitzilaios Columbia Section University of South Carolina |
|
Qining Wang Beijing Section Peking University |
The IEEE Robotics and Automation Society (RAS) and IEEE Consumer Electronics Society (CES) seek candidates for the position of Editor-in-Chief of the IEEE Transactions on Haptics (T-H), serving a five-year non-renewable term starting 1 January 2020. Prospective candidates are asked to provide (as PDF files), by 1 September 2019, a complete curriculum vitae, a brief plan for the publication’s future, and a letter of support from their institution or employer.
Submit application materials to: ras@ieee.org
Applicants should possess recognized expertise in the computer science and engineering community, and must have clear employer support.
For more information on the search process, please contact: Amy Reeder a.reeder@ieee.org
Congratulations on the Best Paper Award Winners from ICRA 2019 in Montreal, Canada!
2019 Best Conference Paper Award
Michelle A. Lee, Yuke Zhu, Krishnan Srinivasan, Parth Shah, Silvio Savarese, Li Fei-Fei, Animesh Garg, and Jeannette Bohg
"Making Sense of Vision and Touch: Self-Supervised Learning of Multimodal Representations for Contact- Rich Tasks"
2019 Best Student Paper Award
Justin K. Yim, Eric K. Wang, and Ronald Fearing
"Drift-free Roll and Pitch Estimation for High-acceleration Hopping"
2019 Best Paper Award in Automation

Changsheng Dai, Zhuoran Zhang, Yuchen Lu, Guanqiao Shan, Xian Wang, Qili Zhao, and Yu Sun
"Robotic Orientation Control of Deformable Cells"
2019 Best Paper Award in Cognitive Robotics

Keliang He, Andrew Wells, Lydia Kavraki, and Moshe Vardi
"Efficient Symbolic Reactive Synthesis for Finite-Horizon Tasks"
2019 Best Paper Award on Human-Robot Interaction (HRI)
Louis Dankovich and Sarah Bergbreiter
"Gesture Recognition via Flexible Capacitive Touch Electrodes"
2019 Best Paper Award in Medical Robotics
Ali Ebrahimi, Niravkumar Patel, Changyan He, Peter Gehlbach, Marin Kobilarov, and Iulian Iordachita
"Adaptive Control of Sclera Force and Insertion Depth for Safe Robot-Assisted Retinal Surgery"
2019 Best Paper Award in Robot Vision
Xiaohan Fei, Alex Wong, and Stefano Soatto
"Geo-Supervised Visual Depth Prediction"
2019 Best Paper Award in Service Robotics

Fouad Sukkar, Graeme Best, Chanyeol Yoo, and Robert Fitch
"Multi-Robot Region-of-Interest Reconstruction with Dec-MCTS"
2019 Best Paper Award on Unmanned Aerial Vehicles
Nathan Bucki and Mark Wilfried Mueller
"Design and Control of a Passively Morphing Quadcopter"
2019 Best Paper Award on Mechanisms and Design

Carl John Salaan, Kenjiro Tadakuma, Yoshito Okada, Yusuke Sakai, Kazunori Ohno, and Satoshi Tadokoro
"Development and Experimental Validation of Aerial Vehicle with Passive Rotating Shell on Each Rotor"
2019 King- Sun Fu Memorial Best Paper Award
Elliot Wright Hawkes, Hao Jiang, David L. Christensen, Amy K. Han and Mark R. Cutkosky
"Grasping Without Squeezing: Design and Modeling of Shear-Activated Grippers”
2019 Robotics and Automation Letters Best Paper Award

Bryan Penin, Paolo Robuffo Giordano, and François Chaumette
"Vision-Based Reactive Planning for Aggressive Target Tracking While Avoiding Collisions and Occlusions"
2019 Robotics and Automation Magazine Best Paper Award

Christian Hubicki, Andy Abate, Patrick Clary, Siavash Rezazadeh, Mikhail Jones, Andrew Peekema, Johnathan Van Why, Ryan Domres, Albert Wu, William Martin, Hartmut Geyer and Jonathan Hurst
“Walking and Running with Passive Compliance: Lessons from Engineering: A Live Demonstration of the ATRIAS Biped”
2019 Best Paper Award on Multi-Robot Systems
Hai Zhu, Jelle Juhl, Laura Ferranti, and Javier Alonso-Mora
"Distributed Multi-Robot Formation Splitting and Merging in Dynamic Environments"
2019 Best Paper Award in Robot Manipulation
Chung Hee Kim and Jungwon Seo
"Shallow-Depth Insertion: Peg in Shallow Hole through Robotic In-Hand Manipulation"
More than 220 Local and Regional Chapters of the IEEE Robotics and Automation Society are active around the world. Among other activities, local RAS chapters sponsor or cosponsor minisymposia, student competitions, and continuing education workshops. Local RAS chapters also provide valuable professional contacts, especially for engineers who may have few co-workers who are robotics or automation professionals. Congratulations and welcome to the following newly organized IEEE Robotics and Automation Society Chapters.
Region 5
USA
- IEEE Denver Section Jt. Chapter, Information Theory/Computer/Robotics and Automation Societies
Region 8
Italy
- Politecnico Di Milano Robotics and Automation and Industrial Electronics Joint Societies Student Branch Chapter
Turkey
- Cankaya University, Power and Energy/Robotics and Automation/Computer/Industrial Applications/Aerospace and Electronic Systems Societies Joint Societies Student Branch Chapter
- Eastern Mediterranean University Robotics and Automation Society Student Branch Chapter
Region 9
Ecuador
- Universidad Politecnica Salesiana - Quito Robotics and Automation Society Student Branch Chapter in the Ecuador Section
Region 10
India
- Peoples Education Society University (PES University) Robotics and Automation Society Student Branch Chapter in the Bangalore Section
- Saveetha Engineering College - Kancheepuram Robotics and Automation Society Student Branch Chapter in the Madras Section
- SRM Institute of Science and Technology - Kattankulathur Robotics and Automation Society Student Branch Chapter in the Madras Section
Deep learning and Machine Learning have gone through a massive growth in the past several years. In many domains, such as perception, vision, image recognition, image captioning, speech recognition, machine translation, and board games, in particular, deep learning has drastically outperformed traditional methods and overtaken them to become the method of choice. Will the same happen to robotics and automation? These approaches typically require massive amounts of labeled data, i.e., big data, and massive amounts of compute. In many real robotics and automation applications data is abundant but labeling sparse and expensive. (Deep) reinforcement learning often requires significantly more iterations than are feasible on real systems. Hence collecting sufficient amounts of data is impractical at best. Therefore, a lot of work is done in purely digital or virtual environments. In this special issue we will focus on approaches that have been validated on real world robots, scenarios, and automation problems. While a lot of progress has been achieved on this front in robotic and automation applications, still a lot of progress needs to be made in order to render deep learning approaches directly applicable. Robots and automation systems are interacting with the real world. Hence mistakes that might be costly in terms of lost revenue in approaches that operate in a purely digital world, can cause significant damage and loss of human lives. Therefore, safe learning becomes paramount. A related issue is interpretable learning, i.e. the capability to interpret learning processes, moving towards approaches where humans have the option to be in control and understand with sufficient human-readable details the decision processes of the machine. Successful applications in ‘neighboring’ fields characterized by limited amounts of sparse, labeled data coming from physical systems will also be considered.
Papers should follow the standard RAM guidelines. A full peer-review process will be utilized to select papers for the special issue. Submissions should be made through the RAM submission website by 15 September 2019.
Contributions are expected to present original research on deep learning and machine learning with real world applications in robotics and automation.
*Topics of Interest*
--- deep/machine learning
-- supervised
-- unsupervised
-- reinforcement
--- sample efficient learning
-- new methods
-- use of models
-- simulation to real transfer
-- data augmentation
-- embedding prior knowledge
-- …
--- safe learning
-- confidence estimates
-- guarantees
-- verification
-- interpretable learning
-- …
--- real applications and use case scenarios of deep/machine learning
-- robotics
- perception
- control
- planning
- navigation
- manipulation and grasping
- …
- automation
- maintenance and inspection
- production
- quality management and assurance
- product tracking
- …
-- success stories of deep/machine learning technologies in robotics and automation
-- common issues and solutions in deep/machine learning applications in robotics and automation and neighboring fields such as:
- gravitational waves detection
- geophysics
- high energy physics
- …
*Tentative Schedule/Important Dates*
15 September 2019 - Submission deadline
1 November 2019 - First decision communicated to authors
15 December 2019 - Revised paper submitted
20 February 2020 - Final acceptance decision communicated to authors
10 March 2020 - Final manuscripts uploaded by authors
10 June 2020 - Special issue
*Guest Editors*
Fabio Bonsignorio
The BioRobotics Institute, SSSA and Heron Robots
Italy
RAS Geographic Region 2
David Hsu
National University of Singapore
Singapore
RAS Geographic Region 3
Matthew Johnson-Roberson
University of Michigan
Ann Arbor, Michigan, USA
RAS Geographic Region 1
Jens Kober
TU Delft
Delft, Netherlands
RAS Geographic Region 2
IEEE International Conference on Automation Science and Engineering (CASE) is the flagship automation conference of the IEEE Robotics and Automation Society and constitutes the primary forum for cross-industry and multidisciplinary research in automation. Its goal is to provide a broad coverage and dissemination of foundational research in automation among researchers, academics, and practitioners. IEEE CASE 2019 will be held in Vancouver, BC, Canada, on 22-26 August 2019. The theme of the conference is Smart Automation.

CALL for Papers and Workshop Proposals
IEEE CASE 2019 invites special session proposals, workshop proposals, regular papers, work-in-progress and industry papers related to the topics of the conference, which include but are not limited to:
- Adaptive automation systems
- Agent-based collaborative automation systems
- Automated fault detection, diagnostics, and prognostics
- Automation in life science
- Autonomous systems
- Big data, data mining, and machine learning
- Cloud-based automation
- Cognitive Automation
- Cyber physical production systems and industry 4.0
- Cybersecurity in automation systems
- Human-in-the-loop, human-machine interactions, human-robot / robot-robot collaboration
- Micro- and nano-scale automation technologies and applications
- Modeling, simulation, and optimization of automation systems
- Networked control systems
- Power and energy system automation
- Sensor-fusion for intelligent automation systems
- Smart factories, smart logistics and supply chains
- Smart products with embedded intelligence
- Smart automation in construction and manufacturing
- Smart home/building automation
- Smart and connected healthcare automation
- Standardization in smart manufacturing/home/building/healthcare etc.
- Sustainability and green automation
Submission
Submission Web Site: https://ras.papercept.net/conferences/scripts/start.pl
Important Dates
15 February 2019: RA-L paper submission deadline (Extended: 15 March 2019)
15 February 2019: Special session proposal submission due
1 March 2019: Regular & special session paper submission due
1 April 2019: Workshop proposal, industry paper & poster submission due
15 May 2019: Paper acceptance notification
15 June 2019: Final paper submission due
15 June 2019: Author registration due
22-26 August 2019: Conference
Important Travel Information
Important for all conference attendees who are not Canadian/U.S. citizens- We encourage CASE 2019 attendees from countries that require a visa to apply as early as possible. Visa processing times vary by country.Please consult this website.
Visa Information
ETA (Electronic Travel Authorization)
Visa-exempt foreign nationals who fly to or transit through Canada will need an Electronic Travel Authorization (eTA). Exceptions include U.S. citizens and travellers with a valid visa. Read about the changes and how they may affect you. If you are a dual Canadian citizen used to travelling to or transiting through Canada by air with a non-Canadian passport, you are no longer able to do so as of November 10, 2016. You will need a valid Canadian passport to board your flight.
Letters of Invitation for Organization Approval Purposes
As long as an author submits a paper to IEEE CASE 2019, a letter of invitation can be issued (if needed) to all the co-authors for organization approval purposes, but such a letter cannot be used for visa application.
Official Letters of Invitation for Visa Purposes
Official letters of invitation for visa applications are available to REGISTERED and PAID participants only. These letters do not and cannot commit the Organizing Committee to any financial obligation.
Contact
General Chair:
Weiming Shen, National Research Council Canada
+1 (519) 266-4862
wshen@ieee.org
Program Chair:
Jingshan Li, University of Wisconsin - Madison, USA
+1 (608) 890-3780
jingshan.li@wisc.edu
For more information see: http://case2019.hust.edu.cn/index.htm
Opportunity for increased participation from industrial representatives and scientific programs targeting industrial attendees
ICRA 2019 Industry Forum, Monday, 20 May 2019 in Montreal, Canada
We ask you to submit your work to gain better visibility to potentially high-impact, innovative research and development projects that demonstrate substantial engineering quality, but may not qualify for acceptance based solely on their scientific novelty due to the research-centric nature of typical ICRA sessions. This Industry Forum publication can expand your work’s influence and prominence in the robotic field. This session is an opportunity to share translational research best practices.

Form of Contribution
2-4 page extended abstracts (IEEE standard double-column format) submitted to haidegger@ieee.org in pdf.
Evaluation
Peer review by a panel selected by IEEE RAS Industrial Activities Board
Presentation
Upon acceptance, authors may choose between a 10 min oral or poster with 1 min teaser talk format. Presentations should have interactive parts, demonstrations, video, etc to attract/entertain a wider audience.
Publication
Accepted works will be published online, in a Forum proceedings, while selected works will be invited to get extended to a full article for submission to a Special Issue on Translational Research in Acta Polytechnica (IF: 0.9, OA at no charge) in Q4.
Submission Deadline
Submission are evaluated as they arrive, but no later than 15 May 2019.
Presentation Schedule
At the ICRA Industry Forum, Monday, 20 May 2019 (11:00-17:00)
This year is considered to be a pilot towards establishing a standing translational research track at ICRA. Please contribute!
Questions/info: Tamas Haidegger, haidegger@ieee.org
IEEE and IEEE Standards Association have just launched a groundbreaking report to take ethical implementation of autonomous and intelligent systems (A/IS) worldwide from principles to practice! The First Edition of this important work "Ethically Aligned Design: A Vision for Prioritizing Human Well-being with Autonomous and Intelligent Systems" is available NOW!

The Chair of this initiative is Raja Chatila, Past President of the IEEE Robotics & Automation Society (RAS). Many other RAS members served as sub group Chairs, individual contributors and subject matter experts. Thanks to their hard work and persistance, the First Edition has become a reality! CONGRATULATIONS to ALL involved!
If you are not already involved in The IEEE Global Initiative on Ethics of Autonomous and Intelligent Systems, we invite you to join the open community of over 2,000 global experts focused on cutting edge ethical and values-driven issues in autonomous and intelligent systems and in moving principles to practical application. Join to receive our regular newsletter, announcements, and to get an invitation into our private EAD community.
The Mission and Results of The IEEE Global Initiative on Ethics of Autonomous and Intelligent Systems is to ensure every stakeholder involved in the design and development of autonomous and intelligent systems is educated, trained, and empowered to prioritize ethical considerations so that these technologies are advanced for the benefit of humanity.
To advance toward this goal, The IEEE Global Initiative on Ethics of Autonomous and Intelligent Systems brought together more than a thousand participants from six continents who are thought leaders from academia, industry, civil society, policy, and government in the related technical and humanistic disciplines to identify and find consensus on timely issues surrounding autonomous and intelligent systems.
By “stakeholder” we mean anyone involved in the research, design, manufacture, or messaging around intelligent and autonomous systems—including universities, organizations, governments, and corporations—all of which are making these technologies a reality for society.
Please visit the following more information about this publication, to request the First Edition, and to get involved in future work:
Anyone who is involved in organizing an IEEE or RAS conference, large or small, or is thinking about organizing a conference is encouraged to attend. Get answers to your questions about the organization, requirements, logistics and finances of conferences, both large and small. Speak with the experts for advice on how to make sure your conference is executed flawlessly!
RAS will be presenting a FREE Conference Organizers Workshop during the IEEE International Conference on Robotics & Automation (ICRA 20199). The workshop will take place on Tuesday, 21 May from 13:30-16:30 in room 522a at the Palais des congrès de Montréal, Montreal, Canada.
Preliminary Agenda
1. Welcome and Opening Remarks – Torsten Kroeger
2. Conference Committee Roles and Responsibilities – Torsten Kroeger/ Karinne Ramirez Amaro
3. Getting Started (Requesting Sponsorship & Conference Application) – Helge Wurdemann
4. Conference Publications/Video Capture – Zhidong Wang
5. Managing a Technical Program – Seth Hutchinson
6. Conference Finance (Budgeting through Conference Closing) – Venkat Krovi/ Helge Wurdemann
7. Event Logistics Planning and Execution – Kelly Smith / Torsten Kroeger
8. Working with IEEE Meetings, Conferences & Events – Kelly Smith
Space is limited, so we encourage you to register as soon as your availability is confirmed.
Registration
Please register for this FREE workshop online:
https://app.smartsheet.com/b/form/2d9e465601774246a8826c4f0a823d3c
To register by email or ask questions, please contact: RAS@ieee.org
New this year! In an effort to assist our Members and conference Attendees with the challenges of communicating to the non-engineering community, a series of courses will be offered at the IEEE International Conference on Robotics & Automation (ICRA 2019) 20-24 May 2019 in Montreal, Canada. This collaboration with the IEEE Professional Communications Society is sure to be a valuable experience for all participants. While initially created to benefit our Students and Young Professionals, this course would benefit participants in all stages of their careers.
All events are FREE for ICRA registrants. Please see the course descriptions below and sign up today!
Lunch and Learn Keynote
Tuesday, 21 May 2019 in room 519
12:15-13:30
“How to Talk to the Public about Science and Technology: Learning from Failure”
Starting with a few brief but notable cases of science communication failures, we will work towards some key challenges for communicating effectively with the public. Through these failures, we examine some of the assumptions about the non-expert audience implied by the Deficit Model – a prominent but outdated and problematic model of scientific communication. Specifically, we interrogate the idea that the “public” is homogenous, with similar goals, background knowledge, and purposes for learning about technology. Acknowledging this, we introduce the idea of “Framing Science,” a concept that came to prominence in a 2007 Science editorial by Chris Mooney and Matthew Nisbet. They argue that in order to communicate effectively with the public, scientists and researchers need to do more than learn techniques for “dumbing-down” or “translating" their research while maintaining accuracy: they need to find ways to make complex topics more personally relevant. Without these connections, nonexpert audiences will not be compelled to learn about and understand technical information.
Returning to these case studies, we lay out key strategies for:
(1) understanding an audience’s needs and background;
(2) finding relevant approaches to engage non-experts; and finally,
(3) deploying the right rhetorical techniques (eg. narrative, metaphor, etc.) to communicate within that framework.
We will close by demonstrating how these techniques parallel those used by science journalists, and invite the audience to our workshops, where we’ll help them craft key messages about their own work.
**Registration is NOT required for this Lunch & Learn, however seating is limited. Mark your calendars to attend this important session!
**Lunch will be available in room 519 at the start of the session.
Communications Workshop:
“Theory to Action: Crafting Messages for the Public about your own Research”
Presenters: Lydia Wilkinson and Alan Chong
This 3 hour workshop follows up on the Lunch and Learn keynote with a brief review of the concepts, followed by a set of activities designed to get attendees thinking and developing a message about their own research for the public in multiple ways.
Class size will be limited to 35 registrants for each class.
Register today for ONE of the following classes (same workshop offered 4 different times) by completing the online Registration Form:
https://app.smartsheet.com/b/form/197e3c778bd4400aab8e2004360b1fc9
Thursday, 23 May from 9:00-12:30 in room 523
Thursday, 23 May from 13:30-17:00 in room 523
Friday, 24 May from 9:00-12:30 in room 522a
Friday, 24 May from 13:30-17:00 in room 523
1. Imagining an Audience and Framing their Work: (30 minutes)
We first ask attendees to imagine the characteristics of an imagined audience, focusing on why they would want to learn about the topic at hand and what they would need to know. For this imagined audience, we ask that they develop a brief message about their research (1-2 paragraphs). With a partner, we ask them to share the message and, importantly, the rationale behind their message, and discuss the success/failure of their message. This activity will highlight the importance of crafting a message for a specific audience, and will provide attendees with strategies to analyze their audience in future communication.
2. Developing a “Pitch”: (60 minutes)
Using the feedback from the previous exercise as a starting point, we will ask attendees to reconfigure their message for an audience who might support or invest in their research. We will use the genre of the “elevator pitch” to highlight rhetorical strategies to persuade a non-expert audience. We will ask individuals to develop a short one-minute pitch, deliver that pitch within a small group, and critique that pitch for others. This activity will emphasize the value of concision and persuasion in delivering a message to non-experts, and will provide attendees with a simple tool to hone their message at home.
3. Analogy / Metaphor: (20 minutes)
Having explained the rhetorical structure, components, and function of analogy, we will ask participants to develop an analogy explaining some aspect of their work, including identifying the source and target, and grounds and tension. In small groups, they’ll share and critique their analogies and reflect on their efficacy in communicating to non-expert audiences. This activity will provide participants with an understanding of how rhetorical tools can be used to achieve certain communication goals, laying a foundation for their use in their communicative practice.
4. Employing a Journalistic Framework: (60 Minutes)
In the final activity, we will ask participants to imagine themselves as journalists writing about their own research. We explain the PINTS (Peg-Interesting-Novel-Tension-Significance) model, and ask groups of four to choose their own research (or a predetermined paper from the Robotics and Automation) field, and write a short article that satisfies PINTS requirements for a specific publication (and its implied audience and purpose). Sharing the articles will provide us with an opportunity to examine strategies to engage and inform non-expert audiences, while maintaining scientific accuracy.
At the end of this workshop, participants should have a set of communication artifacts – in varying stages of completion – that have allowed them to: (1) engage with their own research and (2) experiment with multiple techniques for communicating to non-experts. With these experiences in hand, we hope they leave with a better understanding of key issues and strategies for communicating with non-experts in multiple modes and contexts.
Course Presenters

Lydia Wilkinson is a Lecturer in the Engineering Communication Program (ECP) in the Institute for Studies in Transdisciplinary Engineering Education and Practice (ISTEP) at the University of Toronto. She coordinates communication in Chemical Engineering at the University of Toronto, where she supports student success by connecting classroom learning to current engineering projects and their future workplace. She teaches communication at the graduate level through a research course in Chemical Engineering, as well as an optional seminar in career options for PhDs. Lydia’s research investigates interdisciplinary skills transfer with a specific focus on humanities integration for engineers.

Alan Chong is an Associate Professor, Teaching in the Engineering Communication Program (ECP) in the Institute for Studies in Transdisciplinary Engineering Education and Practice (ISTEP) at the University of Toronto. He coordinates communication instruction in Civil and Mineral Engineering, helping students develop their communication skills within various academic and industrial settings. He also teaches proposal and thesis writing to undergraduate and graduate students. Alan’s research interest involves developing opportunities for civic engagement among undergraduate engineering students and in Science Communication pedagogy, particularly around the development of case studies; he also serves as the IEEE Professional Communication Society’s Digital Content Curator.
The IEEE Robotics and Automation Society - Special Interest Group on Humanitarian Technology (RAS-SIGHT) is engaging the academic and non-academic community to propose viable solutions in R&A to address relevant world problems through several initiatives that include competitions, funding impactful projects, and establishment of collaboration networks with academia, industry, and governments. The mission of RAS-SIGHT is the application of robotics and automation
technologies for promoting humanitarian causes around the globe, and to leverage existing and emerging technologies for the benefit of humanity in under-served, under-developed areas in collaboration with existing global communities and organizations.
RAS-SIGHT’s activities broadly fall under Challenges and Projects. While Challenges are intended to advance the state-of-the-art in robotics and automation and provide a platform for researchers and developers to participate in a group setting working towards addressing problems with a humanitarian slant, Projects facilitate communities and associated organizations to work closely with robotics and automation researchers to elevate the quality of life for the residents of communities across the globe. RAS-SIGHT envisions Humanitarian Robotics and Automation Technology Challenges (HRATCs) as an unprecedented opportunity for technologists from around the world to collaborate using their skills and education to benefit humanity. The problems (challenges) are framed with the environmental, cultural, structural, political, socio-economic, and resource constraints so that solutions can be developed, deployed, and sustained.
In this vein, RAS-SIGHT is soliciting proposals that when implemented would improve the quality of life for the beneficiaries. ***To date, 21 projects have been funded***. A listing of previously completed and currently running projects are available from http://ieee-ras.org/ras-sight/
Some important points worth noting:
- The problem that you propose to solve should utilize robotics and/or automation technologies
- It is strongly encouraged that the solution be developed and deployed with active involvement from the community or the end-users that it is intended to benefit
- Sustainability beyond the completion of the project will be a key consideration
If you are interested, please submit a 4 page (max.) proposal in the standard IEEE conference format outlining:
- the problem,
- the solution,
- related work, similar initiatives, and how the proposed project will achieve new results than what is currently available,
- proposed partnerships with existing initiatives,
- number of people who would be impacted,
- previous experiences, both in terms of applied research and deployment,
- project development timeline,
- breakdown of anticipated costs, and how the funds would be used to support the project, and
- short biographies of project members (with URLs of respective websites)
We anticipate to fund proposals in the US$2500-$5000 range from all Regions of IEEE. Please note that the awarded funds cannot be used to support wages or salaries of personnel or for supporting theoretical research. All submissions should be sent to Raj Madhavan, Chair, RAS-SIGHT at <raj.madhavan@ieee.org>.
Important Dates
22 April 2019 - Submission Deadline
10 May 2019 - Acceptance Notifications
Additional information is available from:
Automation Industry’s Most Prestigious Honor to be presented at Automate 2019 in Chicago, IL USA on 10 April.
At a special dinner in conjunction with the Automate 2019 Show and Conference in Chicago on 10 April, RIA will honor Dr. Howie Choset, robotics professor at Carnegie Mellon University and co-founder of the Advanced Robotics for Manufacturing Institute.
2019 Engelberger Robotics Award Recipient

Howie Choset, IEEE and RAS Fellow, will receive the award for Education. In addition to being an inspiring professor in the Robotics Institute at Carnegie Mellon, Dr. Choset has lead key research efforts to help solve significant problems in diverse areas such as surgery, manufacturing, infrastructure inspection and search rescue. Additionally, he has co-founded several companies, including Medrobotics for surgical system, Hebi Robotics for modular robots, and Bito Robotics for autonomous guided vehicles. His FDA-approved surgical snake robot has been in use in the U.S. and Europe since 2015. Add to that his role as a co-founder of the ARM Institute that is aimed at advancing technology development and education for robotics in manufacturing, and his role as a founding editor of the journal Science Robotics, and you see that Dr. Choset is well-deserving of industry’s highest honor.
Engelberger Robotics Award
The award is named for Joseph F. Engelberger, known throughout the world as the ”father of robotics.” Engelberger was founder and president of Unimation, Inc., the world's first industrial robot manufacturer. The Engelberger Robotics Awards are presented to individuals for excellence in technology development, application, education and leadership in the robotics industry. Each winner receives a $5,000 honorarium and commemorative medallion with the inscription: "Contributing to the advancement of the science of robotics in the service of mankind." The awards recognize outstanding individuals from all over the world. Since the award’s inception in 1977, it has been bestowed upon 128 robotics leaders from 17 different nations.
The IEEE Robotics and Automation Society membership will elect six new members of the Administrative Committee in 2019, each to serve a three-year term beginning 1 January 2020. The AdCom is the governing body of the Society.
![]()
RESPONSIBILITIES OF ADCOM MEMBERS
AdCom members must attend two formal meetings each year, one in conjunction with ICRA and the other usually in October/November in conjunction with another major conference. Each AdCom member is expected to serve on at least two boards and/or committees of the Society.
ELIGIBILITY
Any higher-grade member of the Society is eligible to serve and all higher-grade members plus graduate students may nominate candidates and vote.
TO NOMINATE A CANDIDATE
To nominate a candidate or offer yourself as a candidate, contact the Society at ras@ieee.org by 1 May 2019.
PETITION CANDIDATES
Candidates may also petition to be on the ballot. All persons who, by the deadline, submit petitions with valid signatures and IEEE member numbers with at least 2% of the year-end voting membership will be placed on the ballot. Only original signatures on paper or electronic signatures submitted through the RAS petition website will be accepted. Faxed or emailed signatures are NOT acceptable. Contact the Society at ras@ieee.org to obtain a paper petition form or to set up an electronic petition.
Completed petitions must be received by 1 May 2019 to be placed on the ballot.
SELECTION OF FINAL BALLOT
The Nominations Committee will consider all nominations and petitions and select the candidates to be placed on the ballot.
Members and non-members can now add Society membership when giving the Gift of IEEE Membership. The new option to add Society memberships is currently available as part of the half-year membership period, where IEEE and Society memberships are half price. Give the Gift of IEEE Membership for half price is available for the entire half-year period (1 March through 15 August).

Help someone in your life find their professional home in IEEE. Start by giving them the gift of IEEE Membership and consider adding a Society or two! IEEE membership will impact their professional and social life for years to come. IEEE delivers access to the industry's technical information, offers career development tools, and provides access to IEEE's discount programs. Now you can add Society memberships to provide access to their professional benefits as well. Don't wait: get someone started today!
For additional information, please contact Denise Maestri: d.maestri@ieee.org
Each year, the IEEE Robotics & Automation Society offers financial support for three Technical Education Programs (RAS-TEP), also known as "Summer Schools." In an effort to bring RAS closer to its membership, three programs are held each year: one in the Americas, one in Europe/MiddleEast/Africa, and one in Asia/Pacific Rim.
The RAS-TEP program is jointly run by the RAS Member Activities Board (MAB) and the RAS Technical Activities Board (TAB). These Boards will review proposals and select the TEP programs each year. The program sponsors up to three schools per year around the world. Each of the three Technical Education Programs (Summer Schools) will receive up to USD$25,000.00 in funding from RAS. Funding should be used to reduce the event cost for RAS Student Members, and to assist in securing high quality instructors.
The review of TEP proposals is based on assessments from two different viewpoints, the first one with respect to the general structure, including organizational matters and budget, and the second one with respect to the technical content. One or more relevant RAS Technical Committees (TCs) must endorse all submitted proposals. Current TCs are listed at: www.ieee-ras.org/technical-committees.
Guidelines for hosting an RAS-Technical Education Program are HERE

PROPOSAL SUBMISSION
Technical Education Program Proposal - online proposal form
IMPORTANT DATES
Deadlines for the submission of 2019 proposals EXTENDED: 1 May 2019 10 May 2019
Decision: ICRA 2019
Notification: July 2019
This event is part of the 2019 IEEE International Conference on Robotics and Automation (ICRA) wich will be held in Montreal, Canada from 20-24 May 2019.
Robots conjure images of motion. A large body of work in robotics research is concerned with the motion of machines. The 2019 edition of the ICRA Robots and Art program, now the ICRA-X Robots and Art program, invites researchers and practitioners to explore robot motion as creative expression. The program encourages and explores edgy collaborations between engineers and artists in preparation for the significant societal changes to come in the near future as robotics moves beyond the traditional bounds of industry into more social contexts.
For the first time in ICRA history, this year features a curated exhibition of over seven robotic art installations as part of the program (Curated by Alain Thibault, artistic director Elektra). In addition, a separate student art exhibition curated by professional artists and art professors (Alexandre Castonguay and Jean-Pierre Gauthier) will be hosted in parallel to the main exhibition providing early career artists with the opportunity to engage with the robotics research community. A full day forum will explore topics related to the theme, Expressive Motions with the participation of artists/researchers involved in the exhibition alongside a poster/interactive session. An eminent panel is also planned to discuss collaborative aspects of multidisciplinary research.
Invited Speakers (initial)
* Ken Goldberg
* Bill Vorn
* Guillaume Credoz
* Jean-Pierre Gauthier
* Michel de Broin
* Anouk Wipprecht
* Samuel St-Aubin
* Jean-Paul Laumond
* More to confirm
Call for Extended Abstracts/Short Papers
Short papers/extended abstracts are invited to be presented at a special poster/interactive session as part of the main forum. Submissions should be related to the forum topic and should represent work relevant to robotic art. All submissions will be peer-reviewed and accepted abstracts/short papers will be archived on roboticart.org with the possibility of being invited to publish extended work in a special issue in a suitable journal.
Topics include (non-exhaustive):
* Human-Robot Interaction
* Attention systems
* Robot motion planning
* Path planning
* Human-centred manipulation and navigation
* Collaborative robotics
* Human/Robot performances
* Natural movements in robots
* Creative agents
* Embodied agents
* Robot Swarms
* Human motion tracking and analysis
Open Call for Student Artwork
For the first time, ICRA will also host a curated robotic art exhibition for students which will be open to the public (without needing ICRA registration). We are looking to include several outstanding robotic art installations through this open call. Please send a clear description of your work to be considered for inclusion, including a high-quality photograph and any other supporting material including detailed technical requirements such as electrical needs (120V/60Hz only), sketches with dimensions. Please note that the work should be self-contained, and no funding will be made available for transport or any other costs related to the installation. If selected for inclusion, our support is limited to providing a space within the exhibition and access to a standard power source and 24hr security. All selected art works will be catalogued on the website program.
Important Dates
Abstracts/Short Papers/Student Art proposals: 31 March 2019
Decisions Announced: 21 April 2019
ICRA-X program dates: 20-22 May 2019
Please send your submissions to robotsandarts@gmail.com
For more information see: http://roboticart.org/icra2019/
The IEEE Robotics & Automation Society recognizes and congratulates the following individuals for their outstanding accomplishments and service to RAS and the robotics and automation community. They will be honored during an award luncheon to be held during the IEEE International Conference on Robotics & Automation (ICRA 2019) on 22 May 2019 at the Montreal Convention Centre, Montreal, Canada. Please join us in congratulating these outstanding recipients!
RAS Pioneer Award
Roland Siegwart - ETH Zurich, Switzerland
"For fundamental pioneering contributions to Robotics Research in the areas of autonomous navigation and design of flying and walking robots"
Bradley J. Nelson - ETH Zurich, Switzerland
"In recognition of outstanding contributions in micro and nano robotics"
RAS George Saridis Leadership Award in Robotics and Automation
Nancy Amato - University of Illinois (IL), United States
"For exceptional leadership in service of RAS conferences, publications, and membership, as well as mentorship of RAS volunteers"
Alessandro De Luca - Sapienza Universita di Roma, Italy
"For contributions to the robotics and automation community through research innovation and education, and for leadership in publication and conference activities in RAS"
David E. Orin - The Ohio State (OH), United States
"For exceptional leadership and dedication to RAS financial activities, governance, and awards"
IEEE RAS Distinguished Service Award
Allison Okamura - Stanford University (CA), United States
"For outstanding service as Editor-in-Chief of the RAS Conference Editorial Board and contributions to RAS’s new journal, IEEE Robotics and Automation Letters"
Early Academic Career Award in Robotics and Automation
Jeannette Bohg - Stanford University (CA), United States
"For contributions to robot perception and learning for manipulation"
Marco Hutter - ETH Zurich, Switzerland
"For his major contributions to actuation, design, and control of legged robots"
Ilana Nisky - Ben-Gurion University of the Negev, Israel
"For contributions to neuroscience-grounded analysis, design, and training in haptic, teleoperation, and robot-assisted surgery systems"
IEEE Robotics and Automation Award for Product Innovation
Sarcos Robotics - Kristi Martindale
"Sarcos® Robotics Guardian S Mobile IoT Platform: A first-of-its-kind, cloud-connected mobile IoT & sensor platform that provides inspection and surveillance capabilities to augment human-based inspections"
RAS Most Active Technical Committee Award
Technical Committee on Soft Robotics
Co-Chairs: Fumiya Iida, Cecilia Laschi, Ryuma Niiyama, Yiğit Mengüç
RAS Chapter of the Year Award
Italian Chapter of IEEE Robotics and Automation Society - Italy
Co-Chairs: Lucia Pallottino, Andrea Maria Zanchettin
Are you a current Member of the IEEE Robotics and Automation Society? You can now access and download a customized Membership Certificate through IEEE Collabratec® !

Steps to download and print your certificate:
- Log into Collabratec here using your IEEE Member email and password >>
- Click on your name in the top right of the screen and select “Member Certificates” from the drop-down menu
- From the "Member Certificates" page, click on the “Download PDF” link to the right of “IEEE Robotics & Automation Society Membership”
- Open the PDF and print it
Proudly display in your workplace.
The IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2018) was held 1-5 October 2018 in Madrid, Spain. Congratulations to the following Award Recipients - which were announced on 4 October during the Awards Luncheon. Photos of the event are available here: https://www.iros2018.org/videos-and-pictures
IROS Harashima Award for Innovative Technologies
This award is to honor Professor Fumio Harashima, the Founding Honorary Chair of the IROS conferences, by recognizing outstanding contributions of an individual of the IROS community who has pioneered activities in robotics and intelligent systems.

Wolfram Burgard -University of Freiburg, Germany
"For pioneering research in robot simultaneous localization and mapping"
IROS Distinguished Service Award
This award recognizes an individual who has performed outstanding service and leadership for the benefit and advancement of the IROS Conference. Up to two awards will be given annually at the IROS Conference.

Anthony A. Maciejewski - Colorado State University, USA
"For leadership and service on the IROS Conference Paper Review Board"
Hong Zhang - University of Alberta,Canada
"For leadership and distinguished service for IROS Conferences"
IROS Toshio Fukuda Young Professional Award
This award recognizes individuals (from academic institutions, government, industry, or research labs) who, in their early career, have made identifiable contributions that have had a major impact on intelligent robots and systems. Up to two awards will be given annually at the IROS Conference.
Ming Liu - Hong Kong University of Science and Technology,China
"For outstanding contributions to mobile robot path planning and control"
IROS Best Paper Award
This award recognizes the most outstanding paper at the annual IROS Conference.

"Robust Visual-Inertial State Estimation with Multiple Odometries and Efficient Mapping on an MAV with Ultra-Wide FOV Stereo Vision"
M. G. Müller, F. Steidle, M. J. Schuster, P. Lutz, M. Maier, S. Stoneman, T. Tomic, W. Stürzl
IROS ABB Best Student Paper Award
This award recognizes the most outstanding paper authored primarily by a student at the annual IROS Conference.

"Online Temporal Calibration for Monocular Visual-Inertial Systems"
Tong Qin, (Shaojie Shen)
IROS JTCF Novel Technology Paper Award for Amusement Culture
This award recognizes technical papers which have made practical technology contributions to Toys, Toy Models and Amusement Culture. Two recipients this year!

"Real-Time Dance Generation to Music for a Legged Robot"
Thomas Bi, Péter Fankhauser, Dario Bellicoso, Marco Hutter
"Hands and Faces, Fast: Mono-Camera User Detection Robust Enough to Directly Control a UAV in Flight"
Sepehr MohaimenianPour, Richard Vaughan
IROS RoboCup Best Paper Award
This award recognizes technical papers which have made identifiable contributions to RoboCup.

"A Multimodal Classifier Generative Adversarial Network for Carry and Place Tasks from ambiguous Language Instructions"
Aly Magassouba, Komei Sugiura, Hisashi Kawai
IROS KROS Best Paper Award on Cognitive Robotics
This award is to promote interdisciplinary researches on cognition for technical systems and advancements of cognitive robotics in industry, home applications, and daily life.

"Augmenting Physical Simulators with Stochastic Neural Networks: Case Study of Planar Pushing and Bouncing"
Anurag Ajay, Jiajun Wu, Nima Fazeli, Maria Bauza, Leslie P. Kaelbling, Joshua B. Tenenbaum, Alberto Rodriguez
IROS Best Paper Award on Safety, Security, and Rescue Robotics
This award is to promote advanced research on safety, security and rescue robotics. The name of the award is connected with Mr. Motohiro Kisoi who was killed in Great Hanshin-Awaji Earthquake on 17 January 1995. He was a master student of Kobe University, Japan at that time. He had a dream to create a robot that can help people. To memorialize him and Great Hanshin-Awaji Earthquake, the award has established.

"Fire-Aware Planning of Aerial Trajectories and Ignitions"
Evan Beachly, Carrick Detweiler, Sebastian Elbaum, Brittany Duncan, Carl Hildebrandt, Dirac Twidwell, Craig Allen
IROS ICROS Best Application Paper Award
This award is to promote researches on excellent robot application.

"Closed-Loop Single-Beacon Passive Acoustic Navigation for Low-Cost Autonomous Underwater Vehicles"
Nicholas R. Rypkema, Erin M. Fischell, Henrik Schmidt
Congratulations to Seth Hutchinson, RAS President Elect 2018-2019! He has recently been selected Executive Director of the Institute for Robotics and Intelligent Machines (IRIM), Georgia Institute of Technology, USA.
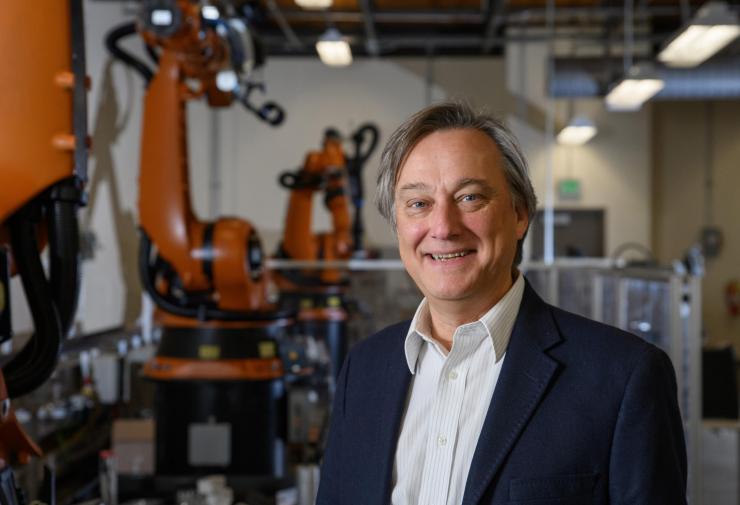
At Georgia Tech, IRIM serves as an umbrella under which robotics researchers, educators and students from across campus can come together to advance the many high-powered and diverse robotics activities.
IRIM’s mission is to create new and exciting opportunities for faculty collaboration; educate the next generation of robotics experts, entrepreneurs, and academic leaders; and partner with industry and government to pursue truly transformative robotics research. IRIM serves more than 90 faculty members, 180 graduate students and 40 robotics labs.
We wish Seth much success in this new role at Georgia Tech, and look forward to a closer collaboration in the future.


