
Latest News
We are pleased to announce that the 2024 IEEE International Conference on Automation Science and Engineering (CASE 2024) will take place in Bari in Puglia (or Apulia), Italy from 28 August-1 September 2024.
The conference theme is Automation 5.0: Automation Everywhere for Better and Smarter Living and will include tutorials and workshops, a technical program of presentations, keynote lectures, and social events. The conference will cover a wide range of topics on Systems, Automation, Control Theory, Autonomous Systems, Discrete Event Systems, Smart Cities, Robotics, Building Automation, Smart Mobility, Information and Communication Technologies, and Factory 4.0.
CASE 2024 invites special session and workshop proposals, regular papers, industry papers, and presentation-only papers related to the conference topics.
IEEE RAS Robotics Foundation Cluster Forum
Robotics Foundations and Future Challenges
Saturday, September 30 1-5pm (Note: this is one day before IROS officially begins)
Room 331, Level 3, Huntington Place
Chairpersons
- Marcelo Ang, National University of Singapore, Singapore
- Giuseppe Loianno, New York University, USA
- Josie Hughes, EPFL, Switzerland
- Jen Jen Chung, The University of Queensland, Australia
Speakers:
- Rebecca Kramer-Bottiglio, Yale University, USA
- Dawn Tilbury, University of Michigan, USA
- Aude Billard, EPFL, Switzerland
This is the second forum hosted by the IEEE RAS Robotics Foundation Technical Cluster. This forum will provide an opportunity for students to hear from distinguished researchers across the breadth of robotics, including plenary talks and panels that cover the foundations of a topic as well as a view to the future.
Early career research students are especially encouraged to participate in the forum.
There is no charge for this event; however, space is limited. Please register in advance.
IEEE RAS TAB X SAC Dinner - For Student and Post-Doctoral Researchers
Saturday, September 30 6-8pmn (Note: this is one day before IROS officially begins)
Rooms 310A & 310B, Level 3, Huntington Place
Students and postdoctoral researchers attending IROS 2023 are cordially invited to the IEEE-RAS TAB (Technical Activities Board) X SAC (Student Activities Committee) Dinner, an event that aims to foster community engagement between current/former Technical Committees (TCs) and students and postdoctoral researchers prior to IROS 2023.
Please Note: Students must be registered for the conference to attend this event. Seating is limited and will be filled on a first-come, first-served basis.
At this gathering, each TC will be seated at designated tables, which provides a unique opportunity to interact and engage with your preferred TCs. We are confident that this event will greatly enhance your understanding of the TCs and SAC.
Learn more about IEEE RAS Technical Committees here.
Learn more about the IEEE RAS Student Activities Committee (SAC) here.
There is no charge for this event; however, space is limited. Please register in advance.
We look forward to sharing this special moment with you.
IEEE Robotics and Automation Society (RAS) Town Hall
Sunday, October 1, 5-6pm
(Directly after the conclusion of the first day of Workshops/Tutorials and immediately before the Welcome Reception)
Room 310A/B, Level 3, Huntington Place
Calling all Robotics and Automation Society (RAS) members, and those interested in learning more about RAS! We want to connect with you at the upcoming RAS Town Hall. RAS leaders will be present to discuss current initiatives and future programs, and to hear your voice on the priorities of RAS and our community.
RAS has many new initiatives in the works for our members:
- An expanded member support program to provide travel and registration support to authors and contributors of our flagship conferences.
- Expanded in-person and online career fairs and services to connect employers with members seeking careers in robotics and automation.
- The proposed launch of two new journals: IEEE Robotics and Automation Practice, to engage our growing community of practitioners, and IEEE Transactions on Field Robotics to engage the field robotics community.
- The empowerment of our Technical Committees (TCs) with greater autonomy and financial support.
- A restructuring of our conference programs to better respond to the needs of our rapidly growing and evolving community.
- The development of online educational content, from certified core curricula to advanced courses.
All in-person attendees of the Town Hall will be provided with newly designed RAS T-shirts!
The Robotics and Automation Society (RAS) oversees all activities related to the organisation of IEEE-RAS conferences and IEEE journals on robotics. The RAS Executive and Administrative Committees are composed of leading scientists from around the world who devote some of their free time for the benefit of our community.
WIE Luncheon and Networking - Women Shaping the Future of Robotics
Monday, October 2, 12:30 - 2:00 pm
Room 310A (Level 3), Huntington Place
Join us for an interactive panel discussion and networking.
Pioneer women roboticists will share their insights on how one can navigate industry and academia, and on the role of women in bringing robotics to the real world! Also, don’t miss the chance to network with other roboticists!
Panelists:
- Andra Keay, Silicon Valley Robotics, USA
- Dawn Tilbury, University of Michigan, USA
The goal for this event is to be more than a luncheon with women. All are encouraged to participate and enjoy the discussion.
There is no charge for this event; however, space is limited. Please register in advance.
For questions, please contact: ieee-ras-wie@ieee.org
Social Hour hosted by RAS Student Activities Committee (SAC)
Monday, October 2, 6-8 pm
The Elephant Room, 439 E Congress St, Detroit, MI 48226
Join the RAS Student Activities Committee’s Social Hour to meet fellow student attendees, grab a snack and beverage, and make networking easier at the conference. Attending a conference as a student can be overwhelming, particularly if you are without an advisor, lab mates, or colleagues. Attending the SAC Social Hour before the conference starts will give you the opportunity to connect with others, which makes it easier to engage in thoughtful conversations on the future of robotics and automation during the remainder of the conference.
There is no charge for this event; however, space is limited. Please register in advance.
Telerobotics and Haptics Joint TC Social Event
Monday, October 2, 6-8 pm
Room 338, Level 3, Huntington Place
The IEEE RAS Technical Committee on Telerobotics and the IEEE RAS Technical Committee on Haptics are happy to invite you to the Telerobotics and Haptics Joint TC Social Event at IROS 2023.
Join the event to meet fellow attendees interested in these topics while grabbing a snack and beverage. The leadership of the two Technical Committees will be present to discuss planned initiatives, answer your questions, and seek feedback from you on your ideas!
There is no charge for this event; however, space is limited. Please register in advance if possible.
RAS Lunch with Leaders (LwL) — for Students and Young Professionals
Wednesday, October 4 - 12:30-1:30 pm
Huntington Place, Room 310A (Level 3)
As a student or young professional attendee, you will meet and interact with distinguished RAS leaders from academia and industry. The event will feature informal roundtable discussions over lunch, which allows participants to receive career advice, gain insight into the
future, or simply engage in general conversation to get to know pioneers in the field.
Don’t miss out on this chance to elevate your networking experience and make meaningful
connections with figures in the world of robotics and automation.
There is no charge for this luncheon; however, space is limited. Please register in advance.
RAS WIE Diversity Cocktail Hour
Tuesday, October 3, 7-9pm
Firebird Tavern, 419 Monroe St, Detroit, MI 48226
Join the RAS WiE for an evening celebrating the strength in our diverse backgrounds and shared aspirations. Grab a snack and beverage and meet some of your colleagues, and network!
There is no charge for this social event; however, space is limited. Please register in advance. Please note: drink tickets will be distributed at the event on a first-come, first-served basis.
RAS Member Booth at IROS
Huntington Place, Exhibit Floor
The IEEE Robotics and Automation Society will again have a Member Booth at IROS. Please visit us on the Exhibit Floor, Booth 443. Come and meet the Staff, and get your questions answered about IEEE and RAS. Pick up your Member Ribbon, and perhaps meet an RAS Leader. Hope to see you there!
We are pleased to announce that a new batch of IEEE Robotics and Automation Letters (RA-L) papers is now available on IEEE Xplore. Check it out!
We are pleased to announce a new special issue for IEEE Transactions on Automation Science and Engineering (T-ASE) on Engineering and Operating Digital Twins for Automated Production or Construction Systems.
Check out the flyer for more details on the Special Issue aims and scope.
Key Dates and Deadlines
- Submission deadline: 31 March 2024
- Tentative publication date: 1 October 2025
We are pleased to announce that Volume 5, Issue 3 of IEEE Transactions on Medical Robotics and Bionics (T-MRB) is now available on IEEE Xplore. Click here for the table of contents and check out the issue now on Xplore!
IEEE RAS TAB X SAC Dinner Invitation
For Student and Post-Doctoral Researchers attending IROS 2023
Dear Students and Postdoctoral Researchers attending IROS 2023,
We cordially invite you to the IEEE Robotics and Automation Society (RAS) TAB (Technical Activities Board) X SAC (Student Activities Committee) Dinner, an event that aims to foster community engagement between current/former Technical Committees (TCs) and students and postdoctoral researchers prior to IROS 2023.
Event Details:
- Date: Saturday, September 30th, 2023 (Note: this is one day before the conference officially begins)
- Time: 6:00 PM - 8:00 PM
- Venue: Huntington Place, 1 Washington Boulevard, Detroit, MI 48226
- Dinner: buffet style
- Note: Students must be registered for the conference to attend this event. There are limited slots, which will be filled on a first-come, first-served basis.
To RSVP, please fill out this form. Please note that the deadline to RSVP is Friday, 15 September 2023 (EoD).
At this gathering, each TC will be seated at designated tables, providing a unique opportunity to interact and engage with your preferred TCs. We are confident that this event will greatly enhance your understanding of the TCs and SAC.
About Technical Committees (TCs):
Technical Committees (TCs) oversee research in the IEEE Robotics and Automation Society; they encourage innovation in various technical areas. RAS’s 45 TCs foster specialized research collaboration; new TCs are formed as emerging topics gain importance. These committees offer valuable opportunities for members to connect and work together within specific subsets of the field.
Learn more about TCs here.
About the Student Activities Committee (SAC):
The Student Activities Committee (SAC) of the IEEE Robotics and Automation Society aims to represent students in robotics and automation worldwide. The SAC provides students with opportunities to advance their careers and improve their professional experience. To achieve these goals, SAC organizes events to give students the chance to find high-quality information, as well as to find the best places where robotics innovators and scientists meet to exchange their knowledge and experience.
Learn more about the SAC here.
We look forward to sharing this special moment with you.
Thank you,
Amy Kyungwon Han,
Associate Vice President of Technical Activities Board
Enrica Tricomi,
Chair of the Student Activities Committee
The RAS Media Services Board (MSB) and Student Activities Committee (SAC) are searching for social media ambassadors for the upcoming IROS 2023 conference in Detroit, Michigan, USA. So if you’re a social media–savvy RAS student member planning on attending IROS, apply now! Social Media Ambassadors will receive up to $500 in travel support.
What do we expect? You will meet with the conference publications chair to prepare and post the major announcements before, during, and after the conference. You can apply at this google form.
The RAS leadership is delighted to announce the launch of the IEEE RAS Member Support Program. This pilot program is designed to support the member content creators of RAS mission-related activities.
The application deadline is 31 August 2023 (23:59:59 EDT). For more information, including eligibility and application instructions, click here. For questions, please contact ras-msp@ieee.org.
We are pleased to announce that Volume 39, Issue 4 of IEEE Transactions on Robotics (T-RO) is now available on IEEE Xplore. Click here for the Table of Contents and check out the issue now on Xplore!
RAS has developed new video submission guidelines for T-RO, RA-L, T-ASE, and RA-M. Check them out!
![]()
RAS is pleased to present two luncheon networking events for our Members attending the 19th IEEE International Conference on Automation Science and Engineering (CASE) in Auckland, New Zealand. Space is limited for these popular events. Don’t miss the chance to attend, please register in advance.
RAS Lunch with Leaders (LwL) for Students and Young Professionals
 |
Sunday, 27 August 12:30 – 13:30 Gallery Room 4, Cordis Hotel, Auckland, New Zealand |
This luncheon is open to student and young professional attendees. The luncheon offers the chance to meet and interact with leaders from RAS and industry. Informal discussion over lunch will take place round table style. Join us for career advice, insights into where the field is headed, or general conversation to get to know leaders in the field of robotics and automation.
The luncheon is free to attendees, but you must be registered in advance here.
Leaders include George Q. Huang, Weiming Shen, Dawn Tilbury, Birgit Vogel-Heuser, Peter Xu, and more.
RAS Women in Engineering (WIE) Luncheon - Panel Discussion on Diversity
 |
Diversity in Automation Science and Engineering MONDAY, 28 August 12:15 – 13:30 Gallery Room 4, Cordis Hotel, Auckland, New Zealand The WIE luncheon provides the opportunity to foster discussion on the role of women in robotics and automation, inspire girls, and promote collaborations and initiatives to advance women in leadership. The goal for this event is to be not only a lunch for women but, moreover, a lunch with women. Therefore, all are more than welcome to participate and enjoy the discussion. The luncheon is free to attendees, but you must register in advance here. |
We are pleased to announce the call for papers for the 2024 IEEE International Conference on Robotics and Automation (ICRA), which will be held 13-17 May 2024 in Yokohama, Japan.
Check out the website and flyer for more details. Below are some of the key dates and deadlines:
- Paper submission deadline: 15 September 2023
- Workshop/tutorial program submission deadline: 25 September 2023
- Robot competition proposal submission deadline: 15 October 2023
Held as part of ICRA 2023 in London, the inaugural RAS Automation Technical Committee (TC) Cluster Forum convened on 30 May 2023. This groundbreaking event, chaired by Birgit Vogel-Heuser and Angela Faragasso, brought together pioneers in the field of automation. The central theme of this forum was How can automation contribute to a livable and sustainable society in the future? Addressing this question is critical for the world to progress amidst rapid technological advancements.
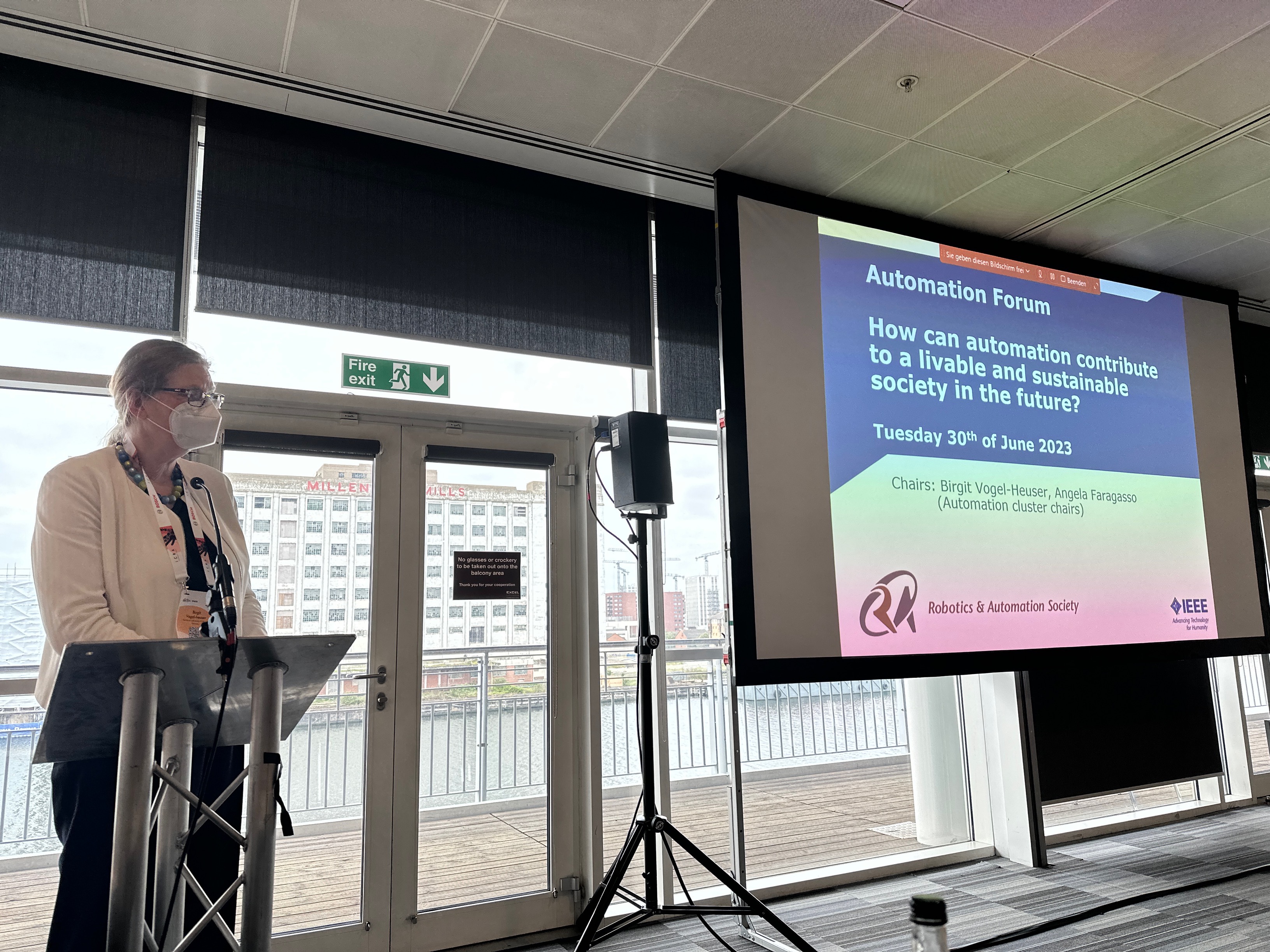
Figure 1. Birgit Vogel-Heuser chaired the 2023 Automation TC Cluster Forum, which featured discussions on how to envision automation for a sustainable future.
A future where operations are dominated by automation is not merely possible—it’s our current trajectory. The forum fostered comprehensive discussions on what society will look like in 2035-2050, resource limitations, social acceptance of autonomous systems, and the sheer scope of fields that automation could revolutionize.
The forum featured a distinguished lineup of speakers from academia and industry who shared their insights on topics including: automation in healthcare, agriculture, and smart buildings; the role of collaborative robots in logistics and manufacturing; human-centered automation; sustainability; and cloud computing. For more details and an in-depth look at the forum’s program, visit the website, where you can also download some of the slides presented during the event.
The RAS Automation TC Cluster plans to address many other pressing topics moving forward. One in particular concerns the usage, benefits, and potential risks of open-source software. By focusing on this topic, the Cluster aims to foster community inclusion in developing new, interconnected systems, and similarly, in defining interfaces to facilitate connectivity between legacy and proprietary systems.
The Automation Cluster looks forward to continuing to engage the RAS community in the future. The Cluster represents a fresh initiative by RAS to merge and coordinate TCs, which will create a more unified front in advancing automation research and applications. The Cluster welcomes feedback and contributions from the community; it hopes to foster an environment of collaboration and innovation.

Figure 2. The audience at the 2023 Automation TC Cluster Forum was engaged and keen to explore the pivotal role of automation in shaping our sustainable future.
Travel Grant applications are now open for the 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) in Detroit, MI, USA!
Supported by the IEEE Robotics and Automation Society (RAS), the IEEE Industrial Electronics Society (IES), the Robotics Society of Japan (RSJ), and Society of Instrument and Control Engineers (SICE), the IROS Travel Grants help defray the costs of attendance at IROS for student authors or authors from developing countries.
The application deadline is 13 August 2023 (23:59:59 EDT). Check out the website and flyer for more details!
Who are the leaders in the robotics and automation field? Who should be honored with a prestigious IEEE RAS Award? Consider nominating them! But hurry, the deadline for IEEE Robotics and Automation Society Award nominations is midnight (US ET) 1 August 2023 1 September 2023. Details for each award, including eligibility and nomination requirements and lists of previous recipients, may be found at www.ieee-ras.org/awards-recognition/society-awards
We are pleased to announce that a new batch of IEEE Robotics and Automation Letters (RA-L) papers is now available on IEEE Xplore. Check it out!
IEEE Robotics & Automation Magazine is soliciting nominations for four new Associate Editors (AEs), to begin in January 2024.
AEs play an important role in maintaining the caliber of the magazine; they ensure the quality of published articles by implementing reviews of technical features according to IEEE guidelines, soliciting interesting and topical material articles for publication in the magazine, guiding the overall direction of the publication, and providing feedback from the readership through e-mail conversations, teleconferences, and twice-yearly in-person meetings held in conjunction with IEEE Conference on Robotics & Automation (ICRA) and the IEEE International Conference on Intelligent Robots and Systems (IROS).
AE terms normally consist of a one-year probation period followed by two years of additional service if performance is satisfactory. Applicants should have a strong technical background and excellent English language skills. Nominations should include a resume (not to exceed three pages), a description of previous experience with publications as a reviewer or in other capacities, and a list of areas of technical expertise. Please submit nominations via the online form.
Nominations are due 1 September 2023.
We are pleased to announce that Volume 20, Issue 3 of IEEE Transactions on Automation Science and Engineering (T-ASE) is now available on IEEE Xplore. Click here for the table of contents and check out the issue now on Xplore!
Zen Koh and his team from Fourier Intelligence won the IEEE/IFR Innovation and Entrepreneurship Award (IERA) for the ArmMotus™ EMU "for the combination of smart adaptive rehabilitation and entertainment technology,” which “can transform our healthcare landscape." The ArmMotus™ EMU is “a 3D back-drivable upper limb rehabilitation robot that adopted an innovative cable-driven mechanism.”
The IERA Award recognizes “the entrepreneurial commercialization of ideas into actual products.” Winners receive $2000 and a plaque; the award is jointly sponsored by the IEEE Robotics and Automation Society (RAS) and the International Federation of Robotics (IFR). It was presented at the ICRA 2023 Awards Ceremony in London.
For more details, check out the piece at IFR.
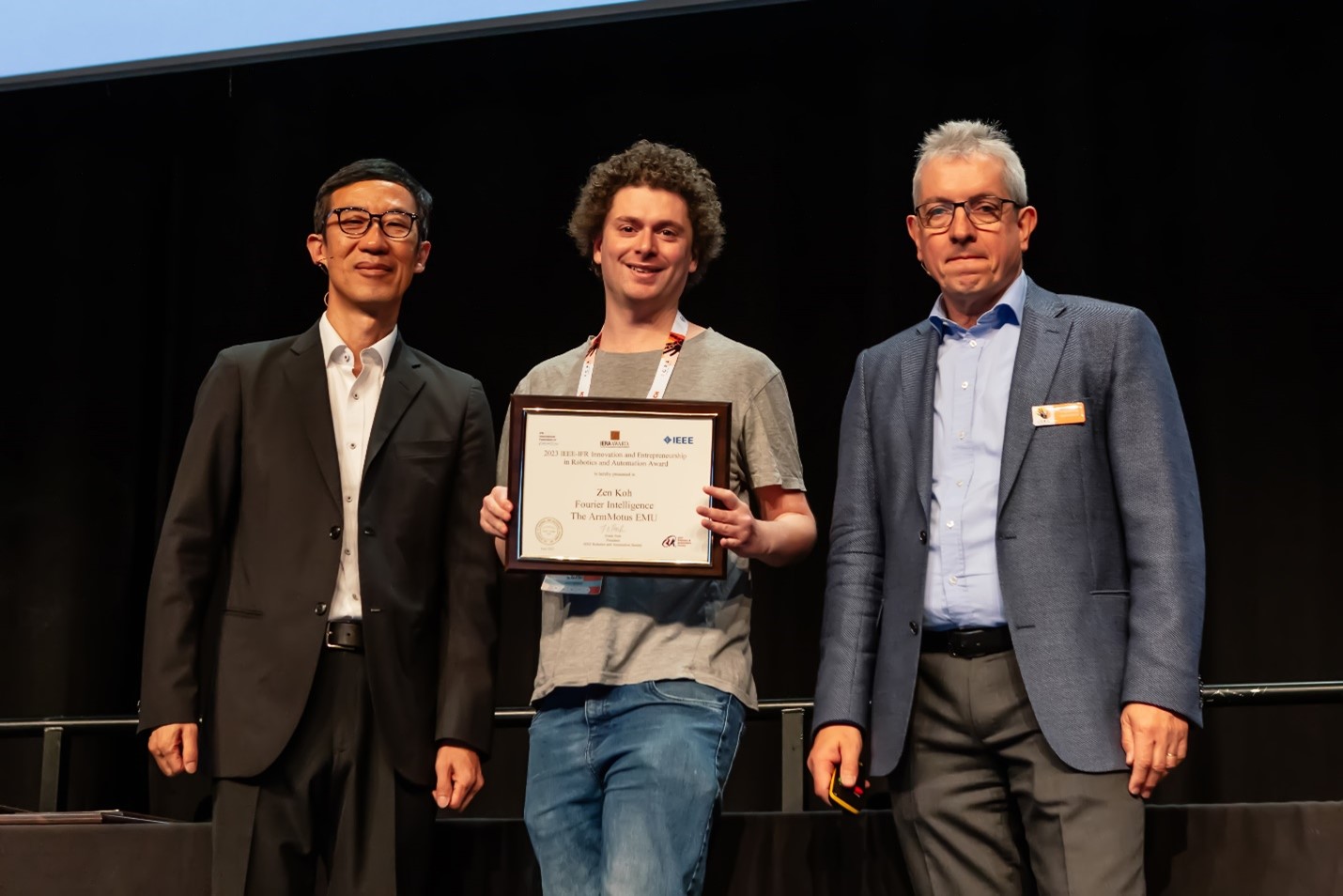
Jonathan Eden, University of Melbourne (center) accepts the IERA Award on behalf of Zen Koh from Frank Park, RAS President (left) and Wolfram Burgard, RAS Awards Chair (right).
The RAS Media Services Board (MSB) and Student Activities Committee (SAC) are searching for social media ambassadors for the upcoming CASE 2023 conference in Auckland, New Zealand. So if you’re a social media–savvy RAS student member planning on attending CASE, apply now! Social Media Ambassadors will receive up to $500 in travel support.
What do we expect? You will meet with the conference publications chair to prepare and post the major announcements before, during, and after the conference. You can apply at this google form.


