Researchers at the University of Leeds and collaborators from the University of California San Diego won the Best Paper Award at RoboSoft, the leading international conference focused on soft robotics research. Soft robotics is gaining attention in medical applications because compliant machines can interact more safely with delicate objects and complex anatomy.
The award-winning paper describes a 1.8 mm soft growing robot that can be steered magnetically, sense its own shape in real time, and operate without internal pressure. These advances could help improve patient outcomes following minimally invasive procedures.
We spoke with lead author Benjamin Calme about the team’s work.

Q: Congratulations to you and your team on winning the award. Before we get into the paper itself, could you tell readers a little about yourself and how you arrived in this field?
Benjamin Calme: My path into robotics is a bit unusual. I’m from France and I actually started with a medical degree. Over time I realized I was more interested in research than in day‑to‑day clinical practice. In France, if you want a research and teaching career in medicine, you’re expected to get an equivalent engineering degree as well. That’s what pushed me toward engineering—and from there into robotics.
That led me into robotics labs in Paris and Strasbourg, where I worked on medical robotic platforms for applications such as needle insertion inside MRI scanners and technologies to help runners reduce injury risk. Through those projects I fell in love with robotics.
Staying in medical robotics was a natural extension of my previous work. It’s also why I was hired in Leeds. That is, you need someone who can translate between surgeons and engineers. Surgeons know what they want clinically, engineers know how they want to solve the problem, and those views don’t always match. My role is often to say, “This is what the surgeon actually wants, and this is how we can realistically help.”
I also help when systems move toward pre-clinical testing: designing study protocols, discussing workflows with clinicians, and helping them understand how a new platform behaves compared with conventional tools.
Q: For readers outside soft robotics, what is a “growing robot”?
Benjamin Calme: It moves more like a plant than a traditional robot. Instead of pushing or dragging its whole body through the environment, it extends at the tip by bringing material from inside the robot outward. In effect, the robot grows into the space ahead of it.
We often call these ‘vine robots’ because the idea is inspired by climbing plants. The body is soft and compliant, so when it encounters obstacles, it can deform and follow paths of lower resistance.
That can be very useful inside the body, where space is constrained and tissues are delicate. Rather than forcing its way forward, the robot can adapt to the environment.
Q: What problems does this work address?
Benjamin Calme: A central issue is friction. In many procedures, conventional flexible tools still rub against tissue as they are inserted and withdrawn. That can cause irritation or inflammation.
With a growing robot, the body sections already in place move far less because new material advances at the tip. That can significantly reduce friction along the path.
For patients, that can mean less discomfort and fewer side effects. It can also help clinicians attempt procedures in anatomical regions, such as the brain, where the margin for error is very small.
Q: Your paper highlights pressure-free growth. Why is this important?
Benjamin Calme: Safety is one reason, and controllability is another.
Many earlier growing robots relied on internal air pressure. But if you are working in fluid-filled spaces near the spine, or inside blood vessels, introducing air because of a leak is unacceptable. By removing the need for internal pressure, that risk disappears.
There is also a practical control benefit. In some earlier prototypes, we used pressure to grow and magnetic fields to steer. That meant alternating between growth and steering steps rather than doing both together.
Now we can grow and steer simultaneously, which makes the system faster and more usable.
Q: What is novel about your approach compared with previous systems?
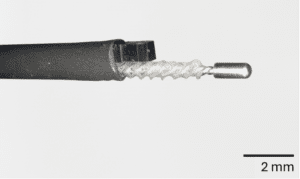
Benjamin Calme: One key contribution is combining shape control and shape sensing in a structure that can still be miniaturized. Our current prototype has an outer diameter of just 1.8 mm. Many previous designs place separate actuators or sensors along the robot body. Those solutions can become slow, bulky, or difficult to shrink to catheter scale.
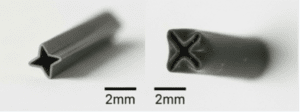
We instead embed magnetic functionality directly into the silicone body by mixing magnetic particles into the material, molding it, and then magnetizing regions in controlled directions.
You can think of that pattern as the robot’s magnetic DNA. When we apply an external magnetic field, the robot bends into predictable shapes. By tracking how those magnetized regions move, we can also estimate the robot’s shape in real time. So, with one integrated structure, we achieve both actuation and sensing.
Q: How does the real-time shape control system operate?
Benjamin Calme: We first manufacture the internal tail section of the robot from silicone containing magnetic particles. That tail later everts and becomes the outer body as the robot grows.
Before that happens, we place the material in a coil and apply a strong magnetic field. By orienting the material carefully during magnetization, we assign different magnetic directions along its length and cross-section.
Once deployed, moving an external magnet around the robot creates specific deformations. Because the magnetic pattern is known, we can also infer shape as the robot moves, with sensing updates up to 500 Hz.
A subtle challenge was preventing unwanted attraction between inner and outer layers, which would increase friction. Designing patterns that gave useful control without causing sticking required significant optimization.
Q: The paper also demonstrates retroflexion and biome sampling in an ex vivo stomach model. Why are those meaningful milestones?
Retroflexion and biopsy in an ex vivo stomach are important because they show the robot can perform endoscopic maneuvers in a realistic anatomy, not just in bench-top tests. Retroflexion proves it can safely reach difficult angles without the high friction and tissue stress of conventional scopes, and successful sampling shows it can precisely position tools and carry out a core clinical task. Together, they’re a first demonstration that this pressure-free growing robot can do meaningful work in settings that resemble actual medical procedures.
Q: What were the biggest engineering hurdles?
Benjamin Calme: Manufacturing at this scale was a major challenge. Our catheter has an outer diameter of about 1.8 mm, with wall thickness near 100 microns.
That required careful control of injection molding, vacuum processes, particle distribution, and defect prevention. Tiny bubbles or inconsistencies can affect both mechanical performance and magnetic behavior.
Q: What comes next, and how close is clinical use?
Benjamin Calme: We are especially interested in neural and spinal applications, where precise placement of electrodes could help restore function after injury.
We are still early in development. A realistic near-term target is robust pre-clinical performance: safety, biocompatibility, and successful in-vivo demonstrations.
Clinical adoption takes much longer because regulation must be rigorous. That is appropriate when patient safety is involved.
Q: How would you explain this advance to a non-technical person?
Benjamin Calme: I sometimes use the image of brain surgery done with chopsticks. Right now, your surgeon is often working around the most sensitive parts of your body with rigid tools that must be manipulated with extreme care. We’re trying to replace those chopsticks with a softer, more precise, less dangerous tool.
This soft growing robot can be very small and dexterous. It can reduce some types of human error, like tremor, and it doesn’t take much space, so there’s more room for other instruments and better imaging. Surgeons can also see and reach regions that used to be in blind spots.
In the simplest terms, we’re developing a new class of soft, growing robotic tools that can sneak into delicate spaces in the body, minimize damage along the way, and give surgeons more control and information than they have with today’s rigid instruments.
The paper, “Pressure-free Magnetic Soft Growing Robot with Real-Time Shape Control and Sensing for Biome Sampling,” will appear in the proceedings of the 2026 IEEE 9th International Conference on Soft Robotics (RoboSoft) on IEEE Xplore.
See also:
Teleoperated Soft Vine Growing Robot
Growing manipulators through feeding material outside-in: Inversion robots
Bio-Inspired Flower Robot for Emotional Human-Robot Interaction