
Latest News
The Basel Peace Forum 2018 inspires new and unconventional ideas for peacebuilding. To achieve this, carefully selected leading personalities and decision-makers from business, diplomacy, academia, and civil society are invited. The Basel Peace Forum will take place on 14 January 2018 at the Museum of Art (Kunstmuseum), and on 15 January 2018 at the Congress Center in Basel, Switzerland.

Raj Madhavan will be a Guest Speaker for one of the Innovation Forums.
Raj is Founder & CEO, Humanitarian Robotics Technologies, LLC and works at the intersection of robotics & automation and technology-policy.
A ROBOT FOR PEACE? THE POTENTIAL OF ARTIFICIAL INTELLIGENCE
Humanity expects a lot from the development of full artificial intelligence: support for the ending of wars, for example. But at the same time, many fear a loss of control and unintended negative consequences. This forum gathers together experienced technologists and scientists to analyze the role of artificial intelligence in changing warfare and preventing violent conflicts. Furthermore, it explores the impact of virtual platforms on building trust through social and commercial interactions in countries emerging from conflicts.
For more information see: http://basel-peace.org/about-the-forum/
THE ROLE OF ROBOTICS, AUTOMATION, AND AI IN DEVELOPING ECONOMIES
Full-day Forum, International Conference on Robotics and Automation (ICRA), 24 May 2018
ORGANIZERS: RAJ MADHAVAN & DANIEL ASMAR
CALL FOR PRESENTATIONS
Humanitarian robotics, automation, and artificial intelligence technologies will play an ever-increasing role in global development, particularly in developing economies, in the coming years sooner than one might think or be willing to admit. We are already witnessing several instantiations of such applications in established domains ranging from manufacturing and defense to emerging areas such as disaster response, firefighting, and education, to name a few (for instance, see http://www.ieee-ras.org/ras-sight/projects for a listing of the projects being carried out under the auspices of the IEEE RAS Special Interest Group on Humanitarian Technology). The United Nations 2030 Agenda for Sustainable Development consists of seventeen Sustainability Development Goals (SDGs) that include building resilient infrastructures for sustainable industrialization and fostering innovation (Goal 9) to strengthening and revitalizing global partnerships for sustainable development (Goal 17) among others.
Adoption of emerging technologies tends to be slow in developing countries due to reasons that are usually beyond GDP rates and standard of living indices. Whilst the potential of these technologies is for the most part undeniable, the challenge lies in making them reliable, cost-effective and easily accessible for the masses by taking into account socioeconomic, cultural, environmental, and sustainability factors. Additionally, ethical, legal, and societal considerations of robotics, automation, and other emerging AI technologies are of paramount importance as the demarcation lines between individual privacy, safety, and security and those of the collective society get blurred without timely governance and regulation.
To address these concerns, the Sustainable Humanitarian Technologies Forum will take on the above issues centered on the following three themes:
- Robotics, Automation, and AI Technologies for the benefit of humanity
- Technology-Policy and Ethical, Legal and Societal (ELS) Aspects of Emerging Technologies
- Global South Considerations (particularly those of developing countries in Asia, Africa, and Latin America)
The Forum will bring together experts and thinkers from both technology and public policy domains. The format will consist of keynote addresses and regular presentations with a mini panel discussion after each thematic session covering the gamut of issues stemming not only from research, development, and deployment standpoints but also those from public perception of robotics, automation, and AI. An hour-long panel discussion will conclude the Forum with audience participation both at the conference venue and elsewhere (via Twitter and Facebook). As a record of the Forum, we intend to capture key points from speakers, salient points from the discussions, identify missing gaps and future steps, and summarize them in a post-event White Paper to formulate action items.
If you are working in the above areas and if the goals and themes of the Forum are of interest to you, we would love to hear from you! We are soliciting presentations from researchers and practitioners from industry, academia, NGOs, NPOs, regulatory, and funding agencies. Please email us a 2-page (max.) write-up of your background, experience, and what you would like to present at the Forum to icra2018shtf@gmail.com. In addition, include a separate section in your submission on how your participation/presentation would benefit the Forum. Note that you are not required to write a paper but your presentation at the Forum will be archived post-event for the benefit of the community.
Depending on the level of interest, selected presenters will be invited to write an expanded article for a special issue journal. Along with your submission, let us know if you would be interested in submitting an article to such a special issue.
IMPORTANT DATES
Deadline for Submission of 2-page write-up: 15 February 2018 (email to icra2018shtf@gmail.com)
Notification of Acceptance: 25 February 2018
Forum: 24 May 2018 (confirmed)
The IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2017) was held 24-28 September 2017, in Vancouver, Canada. Congratulations to the following Award Recipients - which were announced on 27 September during the Awards Luncheon. Photos of the event are available here.
IROS Harashima Award for Innovative Technologies
This award is to honor Professor Fumio Harashima, the Founding Honorary Chair of the IROS conferences, by recognizing outstanding contributions of an individual of the IROS community who has pioneered activities in robotics and intelligent systems.

Kevin M. Lynch - Northwestern University, USA
"For his pioneering contributions to robotic manipulation"
IROS Distinguished Service Award
This award recognizes an individual who has performed outstanding service and leadership for the benefit and advancement of the IROS Conference. Up to two awards will be given annually at the IROS Conference.

Nancy M. Amato - Texas A&M University, USA
“For Outstanding Contributions to IROS Editorial Methods and Processes”

Wolfram Burgard - University of Freiburg, Germany
“For Outstanding Contributions to the Organization and Quality of IROS Technical Programs”
IROS Toshio Fukuda Young Professional Award
This award recognizes individuals (from academic institutions, government, industry, or research labs) who, in their early career, have made identifiable contributions that have had a major impact on intelligent robots and systems. Up to two awards will be given annually at the IROS Conference.
Andrea L. Thomaz - University of Texas, Austin, USA
“For Outstanding Contributions to Human-Robot Interaction”
IROS JTCF Novel Technology Paper Award for Amusement Culture
This award recognizes technical papers which have made practical technology contributions to Toys, Toy Models and Amusement Culture.
James M. Bern, Grace Kumagai, and Stelian Coros
"Fabrication, Modeling, and Control of Plush Robots”
IROS RoboCup Best Paper Award
This award recognizes technical papers which have made identifiable contributions to RoboCup.
Hafez Farazi and Sven Behnke
"Online Visual Robot Tracking and Identification using Deep LSTM Networks”
IROS KROS Best Paper Award on Cognitive Robotics
This award is to promote interdisciplinary researches on cognition for technical systems and advancements of cognitive robotics in industry, home applications, and daily life.
Renaud Detry, Jeremie Papon Larry Matthies
"Task-oriented Grasping with Semantic and Geometric Scene Understanding”
IROS Best Paper Award on Safety, Security, and Rescue Robotics
This award is to promote advanced research on safety, security and rescue robotics. The name of the award is connected with Mr. Motohiro Kisoi who was killed in Great Hanshin-Awaji Earthquake on 17 January 1995. He was a master student of Kobe University, Japan at that time. He had a dream to create a robot that can help people. To memorialize him and Great Hanshin-Awaji Earthquake, the award has established.
Masashi Takeichi, Koichi Suzumori, Gen Endo, Hiroyuki Nabae
"Development of a 20-m-long Giacometti Arm with Balloon Body Based on Kinematic Model with Air Resistance”
IROS ICROS Best Application Paper Award
This award is to promote researches on excellent robot application.
Rachel M. Hoffman and H. Harry Asada
"A Multi-Track Elevator System for E-Commerce Fulfillment Centers"
IROS ABB Best Student Paper Award
This award recognizes the most outstanding paper authored primarily by a student at the annual IROS Conference.
Yu Fan Chen, Michael Everett, Miao Liu, and Jonathan P. How
"Socially Aware Motion Planning with Deep Reinforcement Learning"
IROS Best Paper Award
This award recognizes the most outstanding paper at the annual IROS Conference.
Duncan W. Haldane, Justin K. Yim, and Ronald S. Fearing
"Repetitive extreme-acceleration (14-g) spatial jumping with Salto-1P"
Today, we are at a crossroads, whereby continued advances in computerization and digitalization are bringing significant transformative changes that will impact society worldwide, revolutionizing global business operations and fundamentally altering how inanimate objects are perceived in a world increasingly reliant on autonomous systems. A key outcome of this transformation will be a notable shift in the interaction of previously independent systems, including humans, and an increased awareness and responsiveness to autonomous systems that will lead to the development of symbiotic relationships that have significant implications for human society as a whole. The IEEE Symbiotic Autonomous Systems (SAS) Initiative aims to take a leadership role in fostering consensus on how best to bring about symbiotic relationships between autonomous systems, and capitalize on the recognition that Symbiotic Autonomous Systems are poised to have a revolutionary impact on society over the coming years. Collaborating with IEEE communities and global organizations conducting ongoing efforts in the area of autonomous and intelligent systems, the Initiative will pave the way for the development of a new field of symbiotic systems science to consolidate and advance technological expertise with emphasis on ethical, societal, legal implications, and with the objective to promote human-centric economic growth.
We have recently released a comprehensive White Paper outlining our thoughts and direction. The White Paper provides an overview of the enabling technologies and their evolution, provides examples of impact in a number of verticals, and highlights ethical, legal, and societal implications.
The White Paper is available here:
https://symbiotic-autonomous-systems.ieee.org/images/files/pdf/sas-white-paper-final-nov12-2017.pdf
The SAS Initiative is looking for interested RAS folks to join the effort.
Please send an email to <ieeefdc.sas@gmail.com>.
More information on this initiative can be found here: https://symbiotic-autonomous-systems.ieee.org
Congratulations to the following RAS Members - elevated to IEEE Fellow grade, effective 1 January 2018!
2018 RAS Fellows evaluated by the IEEE Robotics & Automation Society
Pieter Abbeel - University of California, Berkeley, USA
"For contributions to apprenticeship and reinforcement learning for robotics and autonomous systems"
Hajime Asama - University of Tokyo, Japan
"For contributions to distributed autonomous robotic systems"
Oliver Brock - Technische Universität Berlin, Germany
"For contributions to mobile manipulation and grasping"
Jian Dai - King's College London, United Kingdom
"For contributions to reconfigurable and metamorphic mechanisms"
Jaydev Desai - Georgia Institute of Technology, USA
"For contributions to medical and swarm robotics"
Maria Gini - University of Minnesota, USA
"For contributions to multi-agent programming in robotics"
David Hsu - National University of Singapore, Singapore
"For contributions to robot motion planning"
Lynette Jones - Massachusetts Institute of Technology, USA
"For contributions to tactile and thermal displays"
Shugen Ma - Ritsumeikan University, Japan
"For contributions to the design and control of environment-adaptive robots"
Kazuhiro Saitou - University of Michigan, USA
"For contributions in computational assembly and disassembly design of mechanical products"
Siddhartha Srinivasa - University of Washington, USA
"For contributions to robotic manipulation and human-robot interaction"
Jocelyne Troccaz - Université Grenoble Alpes, France
"For contributions to robotics and imaging for medical applications"
2018 RAS Fellows evaluated by other IEEE Societies
Evaluated by the IEEE Aerospace and Electronic Systems Society:
Erik Blasch - US Air Force Research Lab, USA
"For leadership in aerospace information fusion systems"
Evaluated by the IEEE Computer Society:
Peter Stone - University of Texas at Austin, USA
"For contributions to reinforcement learning, multiagent systems, and robotics"
Evaluated by the IEEE Computational Intelligence Society:
Haibo He - University of Rhode Island, USA
"For contributions to adaptive learning"
Evaluated by the IEEE Control Systems Society:
Mark Campbell - Cornell University, USA
"For contributions to control and estimation theory for autonomous systems"
Evaluated by the IEEE Control Systems Society:
Jonathan How - Massachusetts Institute of Technology, USA
"For contributions to guidance and control of air and space vehicles"
Evaluated by the IEEE Control Systems Society:
Sonia Martinez - University of California, San Diego, USA
"For contributions to the geometric mechanics and control"
Evaluated by the IEEE Control Systems Society:
Silviu-Iulian Niculescu - The Laboratoire des Signaux et Systèmes, France
"For research on the effects of delays in system dynamics"
Evaluated by the IEEE Industrial Electronics Society:
Wen-Hua Chen - Loughborough University, United Kingdom
"For contributions to the applications of nonlinear disturbance observer based control"
Evaluated by the IEEE Ultrasonics, Ferroelectrics, and Frequency Control Society:
Shuji Tanaka - Tohoku University, Japan
"For contributions to micro-electromechanical systems for acoustic wave devices, physical sensors, and power generation"
Congratulations to the six RAS members elected by the membership to serve a three-year term beginning 1 January 2018. We wish the newly elected members of the Administrative Committee success and thank all candidates for their willingness to serve and for permitting their names to be included on the ballot.
AdCom Members Elected at Large

Osaka, Japan

Bari, Italy
AdCom Members from RAS Geographic Area 1 (the Americas):

British Columbia, Canada

RAS Geographical Area 2 (Europe, Africa, Middle East--IEEE Region 8):

Karlsruhe, Germany
AdCom Member from RAS Geographical Area 3 (Asia, Australia, Pacific Rim):

Chiba, Japan
The Deadline to vote is 25 October 2017!
RAS members are voting to elect six new members of the RAS Administrative Committee to serve 3-year terms beginning 1 January 2018. All RAS members (Graduate Student Members and above) have received voting instructions, the biographies, and statements of the candidates by email. RAS membership must be active as of 15 August 2017 to be eligible to vote. Members who do not have valid emails registered with the IEEE or have opted not to receive e-mail from IEEE, have received their election materials by post.

Click here to review the candidates' bios and position statements.
CALL FOR PAPERS
IEEE Transactions on Cognitive and Developmental Systems
Special issue on: "Introspective Methods for Reliable Autonomy"
Submission deadline: 31 January 2018
AIM AND SCOPE
As humans, understanding our own limitations, failures and shortcomings is a key for improvement and development. This knowledge is crucial for altering our behaviors, e.g. to execute tasks in a more cautious way. Correspondingly, equipping robots with a set of skills that allows them to assess the quality of their sensory data, internal models, used methods etc. will greatly improve their overall performance. The problem of introspection, directly or indirectly, relates to other research topics: planning, execution monitoring, active perception and mapping. Accordingly, an improved understanding of introspection in robotics has a direct impact on a large variety of application areas (e.g. search and rescue, intralogistic, assistive robotics. The introspection impacts the most the following aspects of robotics system: safety, reliability and the maintenance costs. Information on the internal state of the robot is crucial to make decisions if it is safe to execute the assigned mission considering not only the current state of the perceived
environment, but also the internal state of the robot. Continuous monitoring of the internal state of the robot and automatic assessment can be also used to enhance the maintenance process. Information about the internal state of the robot can be used to estimate the likelihood of potential failure and tailor the efforts to prevent it or to speed up the recovery or repair process by providing detailed information to a human operator or even enable self-repair.
Introspection takes active role in the process of preventing of malfunctions of the robotic system and help to speed the repair process up. These two features have direct impact on the running cost of a robotic system. Preventing unplanned interruptions in the robot operation and shortening the time of the planned interruptions has a direct impact on the cost of robot exploitation.
It is also important to remember that introspective information is a cornerstone of all methods aiming to robotics self-improvement. It provides information crucial in the learning and development process. In this context, it is possible to draw a parallel between human and robotic system. Assessment of the internal state is important input helping to anticipate if the planned action is feasible for the agent (either human or robot). For a complex system, it is difficult to perform such assessment relying only on predefined set of rules and conditions. Therefore, it is necessary to use learning algorithms which will be able to connect the preexisting internal and external conditions with the outcome of a planned action. In such a configuration, a failure became a crucial element of a learning process of an autonomous system.
Finally, it is important to emphasis that introspection is a topic which spans across multiple fields. The introspection is originally a human ability. It is recent years when the idea of
introspection is also becoming present in the field of robotics. Therefore, to obtain a complete picture of the problem of introspection in autonomous systems it is important to have a closer look also at psychological aspect of introspection. Moreover, the impact of introspection in the context of the cognitive science cannot be overlooked.
The primary topic of this issue
How to assess the quality of internal models, methods, sensory data and the hardware used by robots and how to alter their behavior using this information?
The aim of this special issue is fourfold:
* Survey the state of the art in the field.
* Define open research questions in the field.
* Provide a venue to present the recent developments in the field of
introspection.
* Present system papers showing how introspection is integrated and
affects performance of a system.
THEMES
This special issue is addressed to researchers interested in the development of introspective methods for robust autonomy across different research areas. We expect to receive
submissions relevant for following research fields, but to name a few: Long term autonomy, safe operation of robots under uncertanity, performance awareness, reliable-aware operation, cooperative robotics, cognitive and learning robots, developmental robotics, Human-Robot Interaction. Introspection is broad term covering a set of topics.
Topics relevant to this special issue include, but are not limited to:
* Internal assessment (Map quality assessment, Perception quality
assessment, Classification quality assessment)
* Analysis (Failure analysis, Execution monitoring, Meta-reasoning)
* Introspection-related actions (Failure recovery, Reconfigurable
robots, Planning with uncertainty)
IMPORTANT DATES
31 January 2018 - Deadline for manuscript submissions.
15 May 2018 - Notification of authors
15 June 2018 - Deadline for submission of revised manuscripts
31 July 2018 - Final decisions
SUBMISSION
Manuscripts should be prepared according to the Information for Authors of the journal found at http://cis.ieee.org/ieee-transactions-on-cognitive-and-developmental-systems/131-ieee-transactions-on-autonomous-mental-development-information-for-authors.html
and submissions should be made through the IEEE TCDS Manuscript Center at https://mc.manuscriptcentral.com/tcds-ieee selecting the category SI: Introspective Methods for Reliable Autonomy.
AIMS AND SCOPE OF THE JOURNAL
The IEEE Transactions on Cognitive and Developmental Systems (TCDS) focuses on advances in the study of development and cognition in natural (humans, animals) and artificial (robots, agents) systems. It welcomes contributions from multiple related disciplines including cognitive systems, cognitive robotics, developmental and epigenetic robotics, autonomous and evolutionary robotics, social structures, multi-agent and artificial life systems, computational neuroscience, and developmental psychology. Articles on theoretical, computational, application-oriented, and experimental studies as well as reviews in these areas are considered.
EDITOR-IN-CHIEF
Yaochu Jin
University of Surrey, Surrey, United Kingdom
GUEST EDITORS
Tomasz Piotr Kucner, Örebro University, Sweden
tomasz.kucner@oru.se
Soren Schwertfeger, ShanghaiTech University, China
soerensch@shanghaitech.edu.cn
Martin Magnusson, Örebro University, Sweden
martin.magnusson@oru.se
Achim J. Lilienthal, Örebro University, Sweden
achim.lilienthal@oru.se
Rudolph Triebel, Institute of Robotics and Mechatronics, Germany
rudolph.triebel@dlr.de
IEEE Robotics and Automation Magazine seeks articles for a Special Issue on Floating-base (Aerial and Underwater) Manipulation
During the last 20 years, underwater robots have been widely used as a tool for mapping the seafloor using optical and acoustic sensors, with applications to offshore sites inspection, marine geology, underwater archaeology to mention but a few. At the same time, aerial robots are also limited to monitoring and surveillance applications, and research has mainly focused on topics such as perception and navigation. However, a large number of applications exist that go beyond the survey capabilities, and the possibility of manipulating objects with these two challenging technologies could open up an entire set of new applications.
Both underwater and aerial robots are floating-base robotic systems, and this fact makes their control different from classic ground mobile manipulators. From a research perspective, topics and issues such as coordinated control of the whole floating manipulator system, safe interaction with the environment, disturbance rejection, object perception from a floating base, are still important challenges to be solved.
This special issue will provide up-to-date results and novel advanced solutions for floating manipulation, both from the point of view of aerial and underwater fields. In particular, this issue aims to bring together two communities that have so far operated in parallel but without too much interaction, despite the similarities between the two fields.
The topics of interest for paper submissions include, but are not limited to:
- Design of aerial or underwater manipulation systems
- Underwater/aerial hands and grippers
- Mechatronics of manipulators optimized for floating operation
- Coordinated control of floating base and manipulator
- Cooperative control of multiple floating manipulators
- Perception and precise localization for floating manipulation
- Physical interaction of floating base manipulators
- Techniques for assisted remote manipulation
- Learning techniques for floating manipulation
- Motion planning of floating manipulators
- Fault tolerant approaches for floating manipulators
- Any other key enabling technology for floating manipulation
Timeline
15 December 2017 - Deadline for paper submission (Extended: 1 February 2018)
August 2018 - Final notification:
December 2018 - Expected publication:
Submission guidelines
Guest Editors
Matteo Fumagalli, Aalborg University, Denmark
Enrico Simetti, University of Genova, Italy
This one day event will be held at the National Academy of Sciences Building, Washington, DC USA on Friday, 13 October 2017

The inaugural IEEE Tech Ethics Conference features luminaries in technology, philosophy, ethics, and policy development. This highly interactive event will feature keynotes by Rodney Brooks and Danielle Bassett, multimedia showings by Heather Knight, and panels on:
- The Social, Personal and Economic Impacts of AI
- Planes, Trains and Automobiles ... and Ships and More: How Autonomous Transportation Systems are Impacting Society
- Will Neuroscience Research Lead to Conscious AI?
- Influencing the Next Generation of Engineers via Ethics Education
Be part of the conversation! Join us as we explore the ethical and societal implications of technology.
For more information see: https://techethics.ieee.org/events/dc-2017
The Deadline to vote is 25 October 2017!
RAS members are voting to elect six new members of the RAS Administrative Committee to serve 3-year terms beginning 1 January 2018. All RAS members (Graduate Student Members and above) have received voting instructions, the biographies, and statements of the candidates by email. RAS membership must be active as of 15 August 2017 to be eligible to vote. Members who do not have valid emails registered with the IEEE or have opted not to receive e-mail from IEEE, have received their election materials by post.
Use https://eballot4.votenet.com/IEEE to access the ballot and cast your vote now. If you do not remember your password, you may retrieve it on the voter login page. Voting must be completed no later than 25 October 2017. Any returns received after this date will not be counted. The online voting site will close at 4:00 pm Eastern Time.
Click here to review the candidates' bios and position statements.
If you have any questions about the IEEE Robotics and Automation Society voting process, please contact ieee-rasvote@ieee.org or +1 732-562-3904.
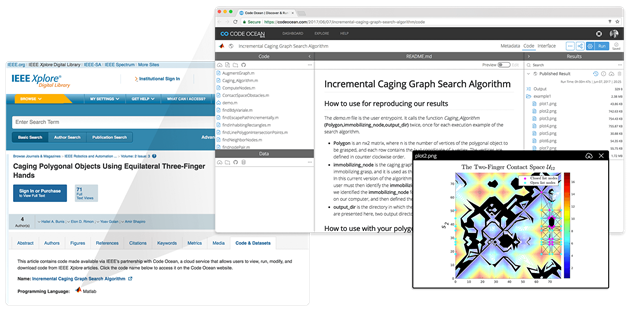
Do you have code associated with your published article? Whether your article was published recently or a few years ago, you can now get even more exposure - and credit - for your work by making the underlying code available to readers.
IEEE has partnered with Code Ocean to make this as easy as possible for you. Code Ocean’s platform enables you to upload and run your code, making it fully reproducible, executable and citable. Not only will you have the opportunity for more citations and visibility of your research, it will be easier for fellow researchers to replicate or build-upon your hard work.
Once the code is published, it will be discoverable to the larger scientific community and a new tab will automatically be added to your article page in IEEE Xplore. See how it works with this example code and associated article published in IEEE Robotics and Automation Letters.
What kind of code is appropriate?
From software engineering to data-intensive applications to computer science, we welcome all code from the IEEE Computer Society. The code, whether simple or complex, should be executable and produce output or results tied to the research within your article. For more questions, visit the FAQ page or contact us at contact@codeocean.com. Need help in setting it up? Code Ocean’s team is ready to assist through the built-in chat.
RAS is pleased to arrange three Luncheon Networking events for our Members attending IROS 2017 in Vancouver, Canada. Space is limited for these popular events. Don't miss the chance to attend either or both because the space has been filled. Advanced registration is required. The cost is $5 per lunch. Register Now! To add these lunches to your registration, please use the "Modify your Registration" link found in your confirmation email, or click the "Already Registered?" Link on the registration website. Using your email address and confirmation number, you will then be able to modify your registration to include the event. If you have any questions, please email irosreg@ieee.org
RAS Women in Engineering Leadership (WIE) Luncheon
Monday, 25 September from 12:00-13:00
Room 306 of the Vancouver Convention Centre West Building (3rd floor)
1055 Canada Pl, Vancouver, BC, Canada
The Women in Engineering (WIE) luncheon provides an opportunity to foster discussion on the role of women in robotics and automation, inspire girls and promote collaborations and initiatives to advance women in leadership. As the goal for this event is to be more than a lunch for women, but a lunch with women. Therefore, men are more than welcome to participate and enjoy the discussion.
Chair: Laura Margheri, RAS Women in Engineering Committee Chair
Speaker:
Sabine Hauert

Sabine Hauert is Assistant Professor in Robotics at the University of Bristol in the UK. Her research focusses in designing swarms that work in large numbers (>1000), and at small scales (<1 cm). Profoundly cross-disciplinary, Sabine works between Engineering Mathematics, the Bristol Robotics Laboratory, and Life Sciences. Before joining the University of Bristol, Sabine engineered swarms of nanoparticles for cancer treatment at MIT, and deployed swarms of flying robots at EPFL.
Sabine is also President and Co-founder of Robohub.org, a non-profit dedicated to connecting the robotics community to the world.
As an expert in science communication with 10 years of experience, Sabine is often invited to discuss the future of robotics and AI, including in the journal Nature, at the European Parliament, and at the Royal Society. Her work has been featured in mainstream media including BBC, CNN, The Guardian, The Economist, TEDx, WIRED, and New Scientist.
RAS Lunch with Leaders - LwL (for Students)
Tuesday, 26 September from 12:00 to 13:00
Room 301 of the Vancouver Convention Centre West Building (3rd floor)
1055 Canada Pl, Vancouver, BC, Canada
This luncheon is open to student attendees and offers the chance to meet and interact with RAS and Industry Leaders. Get your questions answered regarding career advice, the direction of the industry, future growth in robotics & automation, publication practices, etc. YOU decide the topic of conversation!
Chair: Megan Emmons, RAS Student Activities Chair
Confirmed Leaders include:
Satoshi Takodoro, Torsten Kroeger, Yasushi Nakauchi, Eugenio Guglielmelli, Ron Lumia, Jing Xiao, Ning Xi, Raja Chatila, David Orin, Wolfram Burgard, Nancy Amato, Antonio Bicchi, Peter Corke, Richard Vaughan, Tony Maciejewski, Bram Vandervorght and…..
Young Professionals Luncheon (SOLD OUT)
Tuesday, 26 September from 12:00 to 13:00
Room 306 of the Vancouver Convention Centre West Building (3rd floor)
1055 Canada Pl, Vancouver, BC, Canada
This event aims at bringing together representatives from the organizers/winners of the recent robotic competitions and challenges, and RAS young professionals to enjoy a meal and open discussions on how robotics challenges and competitions can advance robotics research and drive forward the technology.
Chair: Arash Ajoudani, PhD. (Istituto Italiano di Tecnologia)
SPEAKERS
Sven Behnke, PhD. Professor, Universität Bonn
Title of the talk: “Advancing Robotics Research through Robot Competitions and Challenges”

Dr. Sven Behnke received his MS degree in Computer Science (Dipl.-Inform.) in 1997 from Martin-Luther-Universität Halle-Wittenberg. In 2002, he obtained a PhD in Computer Science (Dr. rer. nat.) from Freie Universität Berlin. He spent the year 2003 as postdoctoral researcher at the International Computer Science Institute, Berkeley, CA. From 2004 to 2008, Professor Behnke headed the Humanoid Robots Group at Albert-Ludwigs-Universität Freiburg. Since April 2008, he is professor for Autonomous Intelligent Systems at the University of Bonn and director of the Institute of Computer Science VI. His research interests include cognitive robotics, computer vision, and machine learning.
Joey Durham, PhD. Manager, AMAZON Research and Advanced Development
Title of the talk: “Grasping Innovation and the Amazon Robotics Challenge”

Joey Durham is Manager of Research and Advanced Development at Amazon Robotics. His team focuses on resource allocation algorithms, machine learning, and path planning for robotic warehouses. He also runs the Amazon Robotics Challenge robotic manipulation contest. Joey joined Kiva Systems after completing his Ph.D. at the University of California at Santa Barbara in distributed coordination for teams of robots. He has been with the company through its acquisition and growth into Amazon Robotics. Previously he worked on path planning for autonomous vehicles at Stanford University for the DARPA Grand Challenge.
Fabio Bonsignorio, PhD, Biorobotics Institute of the Scuola Superiore Sant’Anna, Pisa, Italy
Title of the talk: "IEEE Robotics and Automation Magazine: Introducing the 'R-papers', towards Reproducible Research in robotics."

In the coming issue of RAM (September), we will announce a new kind of papers: the 'R-papers'.
'R' stands for 'reproducible' and this a first for the Robotics community. No other high-quality publication venue gives this (much needed) possibility.
If you have been affected by a major natural disaster such as a earthquake or hurricane, with substantial disruption of operational capabilities (e.g. University shut down), we can grant an ad-hoc extension of the deadline by a maximum of one week.
In these cases, please send an email to EiC.RA.Letters@ieee.org explaining the details of the situation.
IEEE Transactions on Automation Science and Engineering:
Special Issue on Automation Science and Engineering for Smart and Interconnected Healthcare Delivery Systems
There has been growing interest in managing healthcare delivery systems worldwide coupled with a recent influx of funding into the area. Automation is important for healthcare systems engineering. In recent years, the significant changes in healthcare delivery systems and the rapidly development in information technology, data analytics, wearable devices, etc., have generated numerous opportunities for innovation in automation for healthcare delivery systems. In addition, many new challenges have emerged in order to apply and implement these innovations. Such opportunities and challenges have significantly expanded the scopes of traditional automation science and engineering. The goal of this special issue on recent advances in automation science and engineering for healthcare delivery systems is to bring together researchers, clinicians, and healthcare practitioners into a forum, to show the state-of-the-art research and applications in the general area of automation science and engineering for healthcare delivery systems, by presenting efficient scientific and engineering solutions, addressing the needs and challenges for integration with new technologies, and providing visions for future research and development. The central theme of the proposed special issue is on emerging opportunities and future directions in automation science and engineering for healthcare delivery systems, where information technology based modeling, analysis, control and optimization are the focus areas, and broad aspects and issues will be well discussed. Topics to be covered include, but are not limited to the following:
- Automated monitoring and alarming system
- Automated diagnosis, response, and intervention system
- Electronic triage, visit, referral, and consult system
- Information control and coordination system for healthcare delivery
- Patient-centered smart care transition and intervention system
- System modeling and control of interconnected care delivery
- Human-machine interactions in healthcare delivery
- Real-time scheduling and capacity management system
- Modeling of patient engagement and safety in healthcare delivery
- Home-based care activity management system
- Big data and artificial intelligence for smart healthcare delivery
- Healthcare delivery logistics and supply chain management
- System application of robotics, sensors, IoT and wearable devices
Important Dates
1 October 2017: paper submission deadline
1 February 2018: completion of the first round review
1 July 2018: completion of the second round review
1 August 2018: final submission due
1 October 2018: tentative publication date
Guest Editors
Jingshan Li - University of Wisconsin-Madison, USA
jingshan.li@wisc.edu
Xiaolan Xie - Ecole des Mines de Saint Etienne, France
xie@emse.fr
Jie Song - Peking University, China
songjie@coe.pku.edu.cn
Hui Yang - Penn State University, USA
huy25@engr.psu.edu
Gregory Faraut - Ecole Normale Superieure Paris-Saclay, France
gregory.faraut@ens-paris-saclay.fr
Paper Submission
All papers are to be submitted through the IEEE’s Manuscript Central for IEEE Transactions on Automation Science and Engineering http://mc.manuscriptcentral.com/t-ase. Please select “Special Issue” under Manuscript Category of your submission. All manuscripts must be prepared according to the IEEE Transactions on Automation Science and Engineering publication guidelines http://www.ieee-ras.org/publications/t-ase. Please address inquiries to jingshan.li@wisc.edu
Congratulations to the following IEEE International Conference on Automation Science and Engineering (CASE 2017) Award Recipients! Winners were announced and honored during the Awards Ceremony which took place on 22 August 2017 in Xi'an, China. Presentations made by CASE Award Chair Bengt Lennartson.
IEEE-CASE Best Conference Paper Award
An annual award to recognize the Best Conference Paper of the IEEE Conference on Automation Science and Engineering (IEEE CASE) presented in current year.

"Energy-Efficient Elevating Transfer Vehicle Routing for Automated Multi-Level Material Handling Systems"
by Zhou Fang and Jianfeng Mao
IEEE-CASE Best Application Paper Award

"Development of Advanced Manufacturing Cloud of Things (AMCoT) - a Smart Manufacturing Platform"
by Yu-Chuan Lin, Min-Hsiung Hung, Hsien-Cheng Huang, Chao-Chun Chen, Haw-Ching Yang, Yao-Sheng Hsieh and Fan-Tien Cheng
IEEE-CASE Best Student Conference Paper Award
This award is sponsored by the academic family of Prof. Yu-Chi (Larry) Ho. Presented in 2017 by Larry Ho.

"A Circuit-Breaker Use-Case Operated by a Humanoid in Aircraft Manufacturing"
by Anastasia Bolotnikova (Student), Kevin Chappellet, Antonio Paolillo, Adrien Escande, Gholamreza Anbarjafari, Adolfo Suarez-Roos, Patrice Rabate, Abderrahmane Kheddar
Congratulations to the following Authors for their outstanding achievement as recipients of RAS Publication Awards! The awards were announced and presented by Michael Wang, T-ASE Editor-in-Chief, at the IEEE International Conference on Automation Science and Engineering (IEEE CASE 2017) on 22 August 2017 in Xi'an, China.
2017 IEEE Transactions on Automation Science and Engineering Best Paper Award
To recognize the best paper of the IEEE Transactions on Automation Science and Engineering (T-ASE) published in the previous calendar year.
"A Learning-Based Framework for Velocity Control in Autonomous Driving"
by Stéphanie Lefévre, Ashwin Carvalho and Francesco Borrelli
as published in the IEEE Transactions on Automation Science and Engineering; vol. 13, no. 1, pp. 32-42, January 2016
2017 IEEE Transactions on Automation Science and Engineering Best New Application Paper Award
To recognize the Best New Application Paper of the IEEE Transactions on Automation Science and Engineering (T-ASE) published in the previous calendar year.
"Needle Grasp and Entry Port Selection for Automatic Execution of Suturing Tasks in Robotic Minimally Invasive Surgery"
by Taoming Liu and Murat Cenk Cavusoglu
as published in the IEEE Transactions on Automation Science and Engineering; vol. 13, no. 2, pp. 552-563, April 2016
Robotics & Automation (R&A) technologies have the potential to transform and improve the lives of humanity by addressing the world's toughest challenges. The IEEE Robotics and Automation Society - Special Interest Group on Humanitarian Technology (RAS-SIGHT) is engaging the academic and non-academic community to propose viable solutions in R&A to address relevant world problems through several initiatives that include competitions, funding impactful projects, and establishment of collaboration networks with academia, industry, and governments. RAS-SIGHT is the first IEEE Society to have a SIGHT! The mission of RAS-SIGHT is the application of robotics and automation technologies for promoting humanitarian causes around the globe, and to leverage existing and emerging technologies for the benefit of humanity in under-served, under-developed areas in collaboration with existing global communities and organizations.
RAS-SIGHT’s activities broadly fall under Challenges and Projects. While Challenges are intended to advance the state-of-the-art in robotics and automation and provide a platform for researchers and developers to participate in a group setting working towards addressing problems with a humanitarian slant, Projects facilitate communities and associated organizations to work closely with robotics and automation researchers to elevate the quality of life for the residents of communities across the globe. RAS-SIGHT envisions Humanitarian Robotics and Automation Technology Challenges (HRATCs) as an unprecedented opportunity for technologists from around the world to collaborate using their skills and education to benefit humanity. The problems (challenges) are framed with the environmental, cultural, structural, political, socio-economic, and resource constraints so that solutions can be developed, deployed, and sustained.
In this vein, RAS-SIGHT is soliciting proposals that when implemented would improve the quality of life for the beneficiaries. Some important points worth noting:- The problem that you propose to solve should utilize robotics and/or automation technologies
- It is strongly encouraged that the solution be developed and deployed with active involvement from the community or the end-users that it is intended to benefit
- Sustainability beyond the completion of the project will be a key consideration
SUBMISSION
If you are interested, please submit a 4 page (max.) proposal in the standard IEEE conference format outlining:
- the problem,
- the solution,
- related work, similar initiatives, and how the proposed project will achieve new results than what is currently available,
- proposed partnerships with existing initiatives,
- number of people who would be impacted,
- previous experiences, both in terms of applied research and deployment,
- project development timeline,
- breakdown of anticipated costs, and how the funds would be used to support the project, and
- short biographies of project members (with URLs of respective websites)
We anticipate funding 4-6 proposals in the US$2500-$5000 range from all Regions of IEEE. Please note that the awarded funds cannot be used to support wages or salaries of personnel or for supporting theoretical research. All submissions should be sent to Raj Madhavan, Chair, RAS-SIGHT at <raj.madhavan@ieee.org>.
IMPORTANT DATES
Submission Deadline: 3 September 2017
Acceptance Notification: 18 September 2017
Please see the SIGHT section of RAS website for previous and on-going funded projects:
http://www.ieee-ras.org/ras-sight/projects
Call for Nominations: Editors and Associate Editors of IEEE Trans. on Automation Science and Engineering (T-ASE)
Deadline 1 November 2017

The IEEE Trans. on Automation Science and Engineering (T-ASE, http://www.ieee-ras.org/publications/t-ase) is soliciting nominations for multiple Editors and Associate Editors, with a term beginning January 2018. Editors and Associate Editors play important roles in ensuring the quality of publications and in guiding the general development of the Transactions, in multiple capacities including implementing reviews of manuscripts according to IEEE guidelines, soliciting emerging topical articles for special issues, guiding the overall direction of the publication, and providing feedback from the readership. Active participations are expected in the annual IEEE Conference on Automation Science and Engineering (IEEE CASE) and in at least one of the two editorial board meetings held annually in conjunction with the IEEE International Conference on Robotics & Automation (ICRA) and IEEE CASE.
The term of an Editor or Associate Editor normally consists of a one-year probation period followed by four years (for Editor) or two years (for Associate Editor) of additional service if performance is satisfactory. Candidates should have a strong technical background in T-ASE related areas and excellent English language skills. Previous publications in T-ASE and participations in IEEE CASE are strongly preferred.
Nominations should include a resume (not to exceed three pages), a complete list of journal publications, previous experience with publications as a reviewer or in editorial capacities, and areas of technical expertise.
Please submit nominations in a single pdf file to Antonia Carl at a.carl@ieee.org, by 1 November 2017.
RAS is pleased to arrange two Luncheon Networking events for our Members attending CASE 2017 in Xi’an, China. Space is limited for these popular events. Don’t miss the chance to attend either or both because the space has been filled.
The Luncheons are FREE to attendees, but you MUST be registered in advance. Register Here:
https://app.smartsheet.com/b/form/6804817466fa470ba1f337c55facb41d
RAS Women In Engineering (WIE) Luncheon
Tuesday, 22 August 2017
12:30-13:30 in Function Room 10
Wyndham Grand Hotel, Xi'an, China
The WiE luncheon provides the opportunity to foster discussion on the role of women in robotics and automation, inspire girls and promote collaborations and initiatives to advance women in leadership. As the goal for this event is to be more than a lunch for women, but a lunch with women. Therefore, men are more than welcome to participate and enjoy the discussion.
Speaker

Maria Pia Fanti (IEEE Fellow) received the Laurea degree in electronic engineering from the University of Pisa, Italy, in 1983. She was a visiting researcher at the Rensselaer Polytechnic Institute of Troy, New York, in 1999. Since 1983, she has been with the Department of Electrical and Information Engineering of the Polytechnic of Bari, Italy, where she is currently a Full Professor of system and control engineering and Chair of the Laboratory of Automation and Control. Her research interests include discrete-event systems; Petri net; consensus protocols; fault detection; management and modeling of complex systems, such as production systems, logistic and healthcare systems. She has published more than 255 papers and two textbooks on these topics. Prof. Fanti was General Chair of the 2011 IEEE Conference on Automation Science and Engineering. She is Editor of the IEEE Trans. on Automation Science and Engineering and Associate Editor of the IEEE Trans. on Systems, Man, and Cybernetics: Systems. She is member at large of the Board of Governors of the IEEE SMC Society, Co-Chair of the Technical committee on Discrete Event Systems of the IEEE SMC Society, and of the Technical Committee on Automation in Logistics of the IEEE Robotics and Automation Society.
Register for the WIE luncheon HERE:
https://app.smartsheet.com/b/form/6804817466fa470ba1f337c55facb41d
RAS Lunch with Leaders (LwL) for Students and Young Professionals
Wednesday, 23 August 2017
12:30-13:30 in Function Room 10
Wyndham Grand Hotel, Xi'an, China
This luncheon is open to student and young professional attendees. The Luncheon offers the chance to meet and interact with Leaders from RAS and industry. Informal discussion over lunch will take place round table style. Join us for career advice, insights into where the field is headed, or general conversation to get to know Leaders in the field of robotics & automation.
Confirmed Leaders
Fan-Tien Cheng, Bengt Lennartson, Jingshan Li, Peter Luh, Michael Wang, MengChu Zhou, Birgit Vogel-Heuser, Samuel Jia
To join Lunch with Leaders, please register HERE:
https://app.smartsheet.com/b/form/6804817466fa470ba1f337c55facb41d


