
P1872.1 Standard for Robot Task Representation
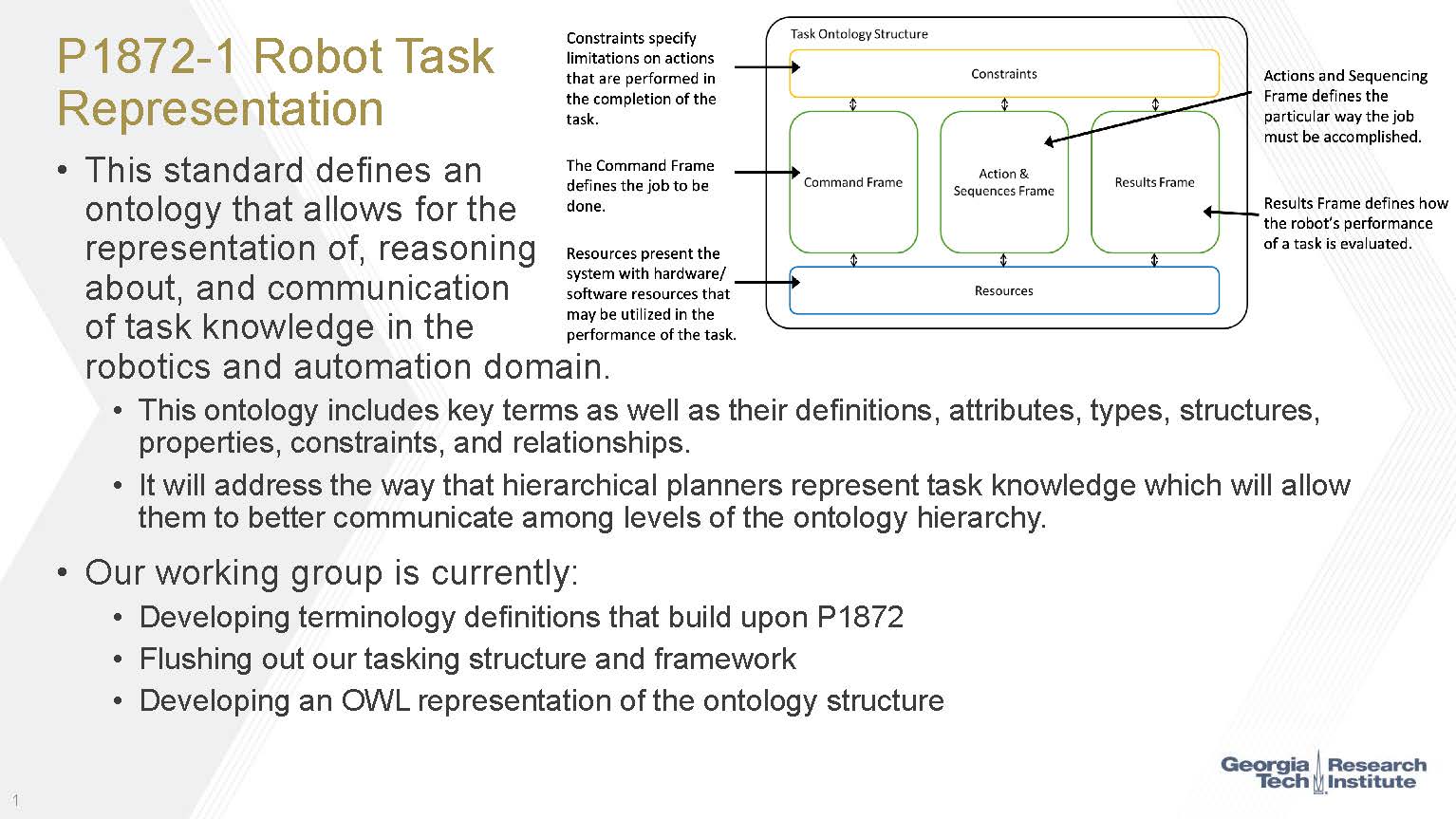
This standard defines an ontology that allows for the representation of, reasoning about, and communication of task knowledge in the robotics and automation domain. This ontology includes key terms as well as their definitions, attributes, types, structures, properties, constraints, and relationships. It will address the way that hierarchical planners represent task knowledge which will allow them to better communicate among levels of the ontology hierarchy.
Join Now Join the IEEE RAS Industrial Activities Board or Standards Committee-The RAS Industrial Activities Board is growing rapidly to respond to the rapid growth in robotics commercialization and we have many committees and workgroups that you can participate in. If something in the Industry & Government area of RAS interests you, please apply to join.
Industry and Government (IAB) News
Easy Links
Students
Students are future of robotics and automation.

CASE 2024
IEEE International Conference on Automation Science and Engineering
IROS 2023
IEEE/RSJ International Conference on Intelligent Robots and Systems
ICRA@40
Special 40th anniversary celebration of RAS and ICRA

ICRA 2024
Volunteer Resources
